序言实际上很早就开始了。
汽车图像系统是一个听起来很高端甚至很神秘的东西,但它并没有那么复杂。许多消费者在购车时经常询问的“倒车影像”系统是目前常见的汽车影像产品之一。由于作者的能力,我们无法核实是哪家车厂率先添加了倒车影像,但根据我们周围几位专家的意见,一些大型车辆在十多年前就被添加到了类似的系统中。毕竟,车身越大,视觉死角就越多。
在那之后,倒车影像被引入小型汽车,然后我们知道倒车影像的应用越来越广泛。甚至一些自主品牌的紧凑型车也加入了倒车影像系统,甚至有些车型直接放弃了倒车雷达,转而使用倒车影像系统。总之,倒车影像是大多数人理解汽车影像系统的开始,但在文章的开头,我们首先给出了什么是汽车影像技术的定义,然后谈论了它们的应用和未来的发展。
定义汽车图像
虽然从这样一句话开始有点令人沮丧,但目前全网甚至世界上都没有对汽车成像技术的精确定义,但笔者仍然可以在这里简单总结一下,因此基于“光学成像系统”或“测距系统”的产品可以视为汽车成像相关产品。
也许很多人不知道测距仪本身就属于图像产品。
也就是说,事实上,我们最常见的图像产品应该是倒车雷达,但测距系统在普通人眼中并不是“图像”,而是测距和成像系统在技术原理上密切相关。从技术史上看,倒车雷达应该出现在1950年至1960年之间,并于20世纪末21世纪初在中国全面普及。
倒车雷达是目前最受欢迎的汽车图像产品。
在那之后,成像技术进入了一个快速发展的时期。倒车影像和全景影像属于我们传统的认知产品,红外夜视系统也是一个很好的延伸。至于智能大灯、车道保持、自适应巡航等,都属于更高级别的成像产品,都具有在成像系统的基础上添加大量“识别信息”的功能。我们稍后会在文章中详细解释,或者像往常一样,让我们先看看目前成熟的汽车成像产品有哪些。

倒车雷达原理图
一开始,倒车影像占据了领先地位。
关于倒车雷达,实际上没有什么好说的,所以我们应该从倒车图像开始。说到倒车影像,首先要说的就是最原始的倒车影像系统。这很简单,即将一个小摄像头放置在汽车后部的中间,并显示在中央控制屏幕或后视镜的侧面。这个倒车影像系统确实可以帮助我们看到汽车的后部,但仍然需要一些时间才能感觉到距离。这种倒车影像系统目前并不多见,即使是百元级别的系统也会采用增加引导线的设计。
那么连接导丝有什么困难呢?事实上,只需在输出端添加一些修改即可实现,只需根据视角和镜头位置计算车身宽度,即可给出良好的左右提示。但是,这个提示仍然存在一个问题,那就是它无法与方向盘联动,只有在直接进入仓库时才能发挥出色的引导作用。
此时此刻,我们需要我们的引导线随着方向盘的方向而改变,但要实现这一功能并不容易。首先,我们需要我们的汽车具有方向盘方向的实时检测能力,然后我们需要一个特殊的端口将这些数据导出到倒车影像系统进行操作,然后我们可以将引导线与方向盘同步。因此,目前我们安装的倒车影像一般都没有这个功能,有些车根本无法安装,这是没有出路的。
进步,多角度,易于查看
好吧,既然我们可以在倒车时加入摄像头,就不能加入其他角度吗?当然,这是可能的。例如比亚迪S6和Acc……
第9代也有类似的设计。驾驶员可以直接看到汽车右前轮位置或右侧的图像。如果你碰巧通过一个有严格宽度限制的区域,这个系统可以显示出很大的优势,让司机可以很容易地通过这里。
当然,一些制造商认为,既然可以添加一个和两个,就可以全部添加,这是目前全景图像系统的热门产品。不同品牌和车型的全景图像系统有不同的位置(倒车图像基本相同),甚至有不同的概念。例如,在梅赛德斯-奔驰目前的全景图像系统中,四个摄像头位于两个外后视镜的前部中心、后部中心和下部,可以自动拼接成一个完整的汽车周边图像。其本质是模拟四点全向测距,这给停车带来了极大的便利。
一些越野车也加入了全景图像系统,但这是为了通过性。丰田普拉多增加了前轮、前侧、后侧和后部的盲点图像系统,可以在路面不平的情况下观察到非常近的前方和非常近的侧面。例如,前透镜和其他透镜也添加了车轮方向模拟信号。如果你碰巧在有明显坑洞的路段行驶,这个系统将非常有用。
革命引入了红外线来观察夜晚。
然后我们来谈谈夜视系统。夜视系统的基础是红外成像系统。在许多人看来,红外成像比相机先进得多,但现代传感器的传感波长非常宽。红外图像传感器和可见光传感器之间的差异通常只是前滤色器的差异。按照目前的产业水平,制作一台基础夜视设备的成本不到1000元。
但是,为什么目前汽车的夜视系统仍然很少?除了法律和相关政策因素外,夜视镜并不能带来夜间运动的良好视野。根本原因是即使是红外光在晚上也不那么充足。因此,汽车制造商经常在车辆前部添加红外线灯,以补充红外线,从而达到更好的照明效果。然而,红外光不如红外图像传感器便宜,这也是目前夜视系统的主要成本。
最后,如果考虑到以上所有因素,红外就足够了,屏幕可以很好地成像。还有一个差距是人类很难跨越的,那就是我们每天看到的物体都是彩色的,但红外夜视系统是单色的,亮度比与我们每天所看到的非常不一致。如果我们只依靠这个系统来驾驶,恐怕事故是不可避免的。因此,像梅赛德斯-奔驰这样的制造商会花费大量资金开发红外物体识别系统,并在屏幕上给出详细的信息提示,以确保车辆的安全,这也是目前红外夜视系统很少使用的主要原因。
再次进入道路时的智能识别
以上所有这些都是我们可以直观识别的汽车图像系统。事实上,关于辅助驾驶的一些东西也是基于汽车图像技术开发的。例如,目前在知名汽车中使用的ACC自适应巡航是基于实时测距系统(通常将超声波与雷达相结合)来测量前一辆车与当前汽车之间的距离和速度,同时控制自己汽车的速度。当然,一些更先进的ACC自适应巡航系统将使用光学传感器收集更多数据,以确保更好的结果。

智能识别原理图
车道偏离预警系统和车道保持系统的基础是光学识别。首先,摄像机以相对较高的帧速率读取前方图片信息,然后由处理器分析车道的方向。因为车道具有高繁茶的特征,所以可以读取车道的方向。结合汽车本身的方向信息,我们可以得到我们是否偏离了车道,以及偏离了多少数据。这是车道偏离警告系统。如果该系统与方向控制系统相关联,那么它就是车道保持系统。
并联辅助系统比较简单,但是……
它可以有效地预防低级别的交通事故。
事实上,并行辅助系统相当复杂,主要基于雷达,并且存在一些光学产品。一般来说,它依靠特定的雷达向特定的方向发送信号。只要车辆出现在相应的间隔内,就会给驾驶员一个不能并线的提示。这个功能对于一些驾驶习惯很差的朋友来说非常有用。毕竟,城市中的大多数事故都是由并线引起的,这是非常有价值的。
跳过并忘记图像的发展
事实上,汽车图像技术的进一步发展并没有图像的味道,但这离不开图像技术的深入发展,比如智能大灯。智能大灯系统的基础也是光学识别,有些可能会添加测距系统作为辅助。当然,智能大灯的光学系统使用亮度识别和高亮点轨迹识别来代替物体识别,并且在测距系统的辅助下,它可以很好地判断对面车辆的位置,并决定是否打开或关闭相应的灯。
事实上,自动制动系统与自适应巡航具有相同的效果,但自动制动系统比自适应巡航稍微复杂一些。毕竟,物体在任何时候都很有可能出现在前方。如果自动制动系统过于灵敏,确实会带来很多麻烦。因此,现在车辆的自动制动系统一般采用光学+超声波测距的双模,不仅需要检测前方物体的距离,还需要光学识别前方是否有东西,否则超声波的反射可能会导致错误的制动结果,追尾是不可避免的。
自动泊车系统绝对是各种成像技术的大师。
自动泊车系统也是目前许多高科技品牌关注的焦点。它可以看作是图像技术的一个复杂的综合应用。传统的自动泊车系统设计不需要光学系统,只要需要超声波测距即可。相对先进的自动泊车系统将使用光学器件作为辅助识别,可以很好地确保泊车位置足够正,前后留出的距离适当。
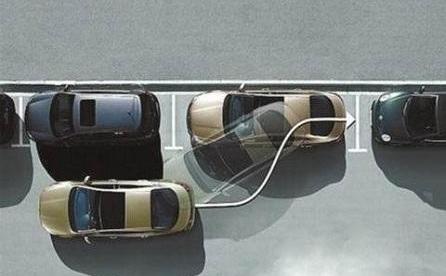
自动停车系统
如果说“如果”是高科技的,那就是梅赛德斯-奔驰最新的神奇车身控制系统,它也是基于光学识别的,但收集的信息量非常巨大。车身通过光学系统收集地面信息,然后计算前方道路的起伏,然后根据车速主动调整悬架高度。这可以说是目前图像技术在汽车顶部最复杂的应用。
研发时间落后是一个问题。
以上是当前图像系统的主要组成部分。一些与控制相关的功能可能很难理解,但至少有一点我们都对倒车影像系统的分辨率有着深刻的理解。虽然倒车影像已经成为主流功能,但我们经常觉得倒车影像的分辨率太低,看起来相当模糊。
从开发板到最终产品的普及,大约需要10年的时间。
但如果我们看看上游制造商目前能在多大程度上做到这一点呢?一套固定导丝、8英寸1080P屏幕的1080P鱼眼相机,可将成本控制在1000元以内。然而,目前很少有倒车影像系统能达到1080P的分辨率,而且汽车的价格是六位数。显然,成本并不是主要问题。
那么问题出在哪里呢?因为汽车是一种可以随时工作的产品,所以零件的稳定性非常高。尽管大多数图像产品都挂在控制系统之外,但出现问题仍然是不可原谅的。因此,目前,我们看到这些车载图像系统非常落后,不是因为它们付不起钱,而是因为它们需要太多时间来开发和证明可靠性。
未来的自动驾驶就在这里。
上面,我们已经提到了汽车成像系统落后于整个成像系统的原因,但它将是未来整个汽车行业发展中最重要的一环。毕竟,自动驾驶技术的基础是环境……
l检测技术,90%的环境检测技术依赖于成像技术。而且,视频产品本身的价格与汽车相比非常低,所以我相信全面普及它绝非易事。

自动驾驶
要实现上图中的自动驾驶,恐怕还有很多年的时间。
然而,汽车成像技术仍然面临着一个大问题,那就是信息量过大。尽管只需增加更多的传感器就可以实现对周围环境的采集,但即使采集到非常大量的环境条件,对这一环节的分析和处理仍然是不可避免的。物体识别算法已经成为最重要的因素,运算单元的理论能力也是一个非常重要的因素。目前,汽车仍在使用ARM低功耗处理器Terga,处理大量高分辨率、高采样的视频流信息显然极其困难。
汽车成像技术必须是汽车制造商未来进步的重点,而上述高科技功能也将是衡量汽车科技含量的重要指标。当然,除了成像技术和互联网的应用,电驱动技术也将成为未来汽车发展的中坚力量。我们不知道未来会发生什么。我们现在能做的就是期待它。让我们期待它!
序言实际上很早就开始了。
汽车图像系统是一个听起来很高端甚至很神秘的东西,但它并没有那么复杂。许多消费者在购车时经常询问的“倒车影像”系统是目前常见的汽车影像产品之一。由于作者的能力,我们无法核实是哪家车厂率先添加了倒车影像,但根据我们周围几位专家的意见,一些大型车辆在十多年前就被添加到了类似的系统中。毕竟,车身越大,视觉死角就越多。
在那之后,倒车影像被引入小型汽车,然后我们知道倒车影像的应用越来越广泛。甚至一些自主品牌的紧凑型车也加入了倒车影像系统,甚至有些车型直接放弃了倒车雷达,转而使用倒车影像系统。总之,倒车影像是大多数人理解汽车影像系统的开始,但在文章的开头,我们首先给出了什么是汽车影像技术的定义,然后谈论了它们的应用和未来的发展。
定义汽车图像
虽然从这样一句话开始有点令人沮丧,但目前全网甚至世界上都没有对汽车成像技术的精确定义,但笔者仍然可以在这里简单总结一下,因此基于“光学成像系统”或“测距系统”的产品可以视为汽车成像相关产品。
也许很多人不知道测距仪本身就属于图像产品。
也就是说,事实上,我们最常见的图像产品应该是倒车雷达,但测距系统在普通人眼中并不是“图像”,而是测距和成像系统在技术原理上密切相关。从技术史上看,倒车雷达应该出现在1950年至1960年之间,并于20世纪末21世纪初在中国全面普及。
倒车雷达是目前最受欢迎的汽车图像产品。
在那之后,成像技术进入了一个快速发展的时期。倒车影像和全景影像属于我们传统的认知产品,红外夜视系统也是一个很好的延伸。至于智能大灯、车道保持、自适应巡航等,都属于更高级别的成像产品,都具有在成像系统的基础上添加大量“识别信息”的功能。我们稍后会在文章中详细解释,或者像往常一样,让我们先看看目前成熟的汽车成像产品有哪些。
倒车雷达原理图
一开始,倒车影像占据了领先地位。
关于倒车雷达,实际上没有什么好说的,所以我们应该从倒车图像开始。说到倒车影像,首先要说的就是最原始的倒车影像系统。这很简单,即将一个小摄像头放置在汽车后部的中间,并显示在中央控制屏幕或后视镜的侧面。这个倒车影像系统确实可以帮助我们看到汽车的后部,但仍然需要一些时间才能感觉到距离。这种倒车影像系统目前并不多见,即使是百元级别的系统也会采用增加引导线的设计。
那么连接导丝有什么困难呢?事实上,只需在输出端添加一些修改即可实现,只需根据视角和镜头位置计算车身宽度,即可给出良好的左右提示。但是,这个提示仍然存在一个问题,那就是它无法与方向盘联动,只有在直接进入仓库时才能发挥出色的引导作用。
此时此刻,我们需要我们的引导线随着方向盘的方向而改变,但要实现这一功能并不容易。首先,我们需要我们的汽车具有方向盘方向的实时检测能力,然后我们需要一个特殊的端口将这些数据导出到倒车影像系统进行操作,然后我们可以将引导线与方向盘同步。因此,目前我们安装的倒车影像一般都没有这个功能,有些车根本无法安装,这是没有出路的。
进步,多角度,易于查看
好吧,既然我们可以在倒车时加入摄像头,就不能加入其他角度吗?当然,这是可能的。例如比亚迪S6和Ac……
rd第9代也有类似的设计。驾驶员可以直接看到汽车右前轮位置或右侧的图像。如果你碰巧通过一个有严格宽度限制的区域,这个系统可以显示出很大的优势,让司机可以很容易地通过这里。
当然,一些制造商认为,既然可以添加一个和两个,就可以全部添加,这是目前全景图像系统的热门产品。不同品牌和车型的全景图像系统有不同的位置(倒车图像基本相同),甚至有不同的概念。例如,在梅赛德斯-奔驰目前的全景图像系统中,四个摄像头位于两个外后视镜的前部中心、后部中心和下部,可以自动拼接成一个完整的汽车周边图像。其本质是模拟四点全向测距,这给停车带来了极大的便利。
一些越野车也加入了全景图像系统,但这是为了通过性。丰田普拉多增加了前轮、前侧、后侧和后部的盲点图像系统,可以在路面不平的情况下观察到非常近的前方和非常近的侧面。例如,前透镜和其他透镜也添加了车轮方向模拟信号。如果你碰巧在有明显坑洞的路段行驶,这个系统将非常有用。
革命引入了红外线来观察夜晚。
然后我们来谈谈夜视系统。夜视系统的基础是红外成像系统。在许多人看来,红外成像比相机先进得多,但现代传感器的传感波长非常宽。红外图像传感器和可见光传感器之间的差异通常只是前滤色器的差异。按照目前的产业水平,制作一台基础夜视设备的成本不到1000元。
但是,为什么目前汽车的夜视系统仍然很少?除了法律和相关政策因素外,夜视镜并不能带来夜间运动的良好视野。根本原因是即使是红外光在晚上也不那么充足。因此,汽车制造商经常在车辆前部添加红外线灯,以补充红外线,从而达到更好的照明效果。然而,红外光不如红外图像传感器便宜,这也是目前夜视系统的主要成本。
最后,如果考虑到以上所有因素,红外就足够了,屏幕可以很好地成像。还有一个差距是人类很难跨越的,那就是我们每天看到的物体都是彩色的,但红外夜视系统是单色的,亮度比与我们每天所看到的非常不一致。如果我们只依靠这个系统来驾驶,恐怕事故是不可避免的。因此,像梅赛德斯-奔驰这样的制造商会花费大量资金开发红外物体识别系统,并在屏幕上给出详细的信息提示,以确保车辆的安全,这也是目前红外夜视系统很少使用的主要原因。
再次进入道路时的智能识别
以上所有这些都是我们可以直观识别的汽车图像系统。事实上,关于辅助驾驶的一些东西也是基于汽车图像技术开发的。例如,目前在知名汽车中使用的ACC自适应巡航是基于实时测距系统(通常将超声波与雷达相结合)来测量前一辆车与当前汽车之间的距离和速度,同时控制自己汽车的速度。当然,一些更先进的ACC自适应巡航系统将使用光学传感器收集更多数据,以确保更好的结果。
智能识别原理图
车道偏离预警系统和车道保持系统的基础是光学识别。首先,摄像机以相对较高的帧速率读取前方图片信息,然后由处理器分析车道的方向。因为车道具有高繁茶的特征,所以可以读取车道的方向。结合汽车本身的方向信息,我们可以得到我们是否偏离了车道,以及偏离了多少数据。这是车道偏离警告系统。如果该系统与方向控制系统相关联,那么它就是车道保持系统。
并联辅助系统比较简单,b……
它可以有效地预防低级别的交通事故。
事实上,并行辅助系统相当复杂,主要基于雷达,并且存在一些光学产品。一般来说,它依靠特定的雷达向特定的方向发送信号。只要车辆出现在相应的间隔内,就会给驾驶员一个不能并线的提示。这个功能对于一些驾驶习惯很差的朋友来说非常有用。毕竟,城市中的大多数事故都是由并线引起的,这是非常有价值的。
跳过并忘记图像的发展
事实上,汽车图像技术的进一步发展并没有图像的味道,但这离不开图像技术的深入发展,比如智能大灯。智能大灯系统的基础也是光学识别,有些可能会添加测距系统作为辅助。当然,智能大灯的光学系统使用亮度识别和高亮点轨迹识别来代替物体识别,并且在测距系统的辅助下,它可以很好地判断对面车辆的位置,并决定是否打开或关闭相应的灯。
事实上,自动制动系统与自适应巡航具有相同的效果,但自动制动系统比自适应巡航稍微复杂一些。毕竟,物体在任何时候都很有可能出现在前方。如果自动制动系统过于灵敏,确实会带来很多麻烦。因此,现在车辆的自动制动系统一般采用光学+超声波测距的双模,不仅需要检测前方物体的距离,还需要光学识别前方是否有东西,否则超声波的反射可能会导致错误的制动结果,追尾是不可避免的。
自动泊车系统绝对是各种成像技术的大师。
自动泊车系统也是目前许多高科技品牌关注的焦点。它可以看作是图像技术的一个复杂的综合应用。传统的自动泊车系统设计不需要光学系统,只要需要超声波测距即可。相对先进的自动泊车系统将使用光学器件作为辅助识别,可以很好地确保泊车位置足够正,前后留出的距离适当。
自动停车系统
如果说“如果”是高科技的,那就是梅赛德斯-奔驰最新的神奇车身控制系统,它也是基于光学识别的,但收集的信息量非常巨大。车身通过光学系统收集地面信息,然后计算前方道路的起伏,然后根据车速主动调整悬架高度。这可以说是目前图像技术在汽车顶部最复杂的应用。
研发时间落后是一个问题。
以上是当前图像系统的主要组成部分。一些与控制相关的功能可能很难理解,但至少有一点我们都对倒车影像系统的分辨率有着深刻的理解。虽然倒车影像已经成为主流功能,但我们经常觉得倒车影像的分辨率太低,看起来相当模糊。
从开发板到最终产品的普及,大约需要10年的时间。
但如果我们看看上游制造商目前能在多大程度上做到这一点呢?一套固定导丝、8英寸1080P屏幕的1080P鱼眼相机,可将成本控制在1000元以内。然而,目前很少有倒车影像系统能达到1080P的分辨率,而且汽车的价格是六位数。显然,成本并不是主要问题。
那么问题出在哪里呢?因为汽车是一种可以随时工作的产品,所以零件的稳定性非常高。尽管大多数图像产品都挂在控制系统之外,但出现问题仍然是不可原谅的。因此,目前,我们看到这些车载图像系统非常落后,不是因为它们付不起钱,而是因为它们需要太多时间来开发和证明可靠性。
未来的自动驾驶就在这里。
上面,我们已经提到了汽车成像系统落后于整个成像系统的原因,但它将是未来整个汽车行业发展中最重要的一环。毕竟,自动驾驶技术的基础是环境……
al检测技术,90%的环境检测技术依赖于成像技术。而且,视频产品本身的价格与汽车相比非常低,所以我相信全面普及它绝非易事。
自动驾驶
要实现上图中的自动驾驶,恐怕还有很多年的时间。
然而,汽车成像技术仍然面临着一个大问题,那就是信息量过大。尽管只需增加更多的传感器就可以实现对周围环境的采集,但即使采集到非常大量的环境条件,对这一环节的分析和处理仍然是不可避免的。物体识别算法已经成为最重要的因素,运算单元的理论能力也是一个非常重要的因素。目前,汽车仍在使用ARM低功耗处理器Terga,处理大量高分辨率、高采样的视频流信息显然极其困难。
汽车成像技术必须是汽车制造商未来进步的重点,而上述高科技功能也将是衡量汽车科技含量的重要指标。当然,除了成像技术和互联网的应用,电驱动技术也将成为未来汽车发展的中坚力量。我们不知道未来会发生什么。我们现在能做的就是期待它。让我们期待它!
4月8日至10日,河南省委副书记、省长谢伏瞻率领2014年重点项目暨产业集聚区建设观摩点评活动第二组成员,深入安阳、濮阳、鹤壁、新乡、焦作5市观摩考察。
1900/1/1 0:00:00丰田汽车、本田、日产汽车及三菱汽车4大车商计划在5月底共同出资成立新公司,以推动电动汽车EV及插电式混合动力车PHV的充电基础设施建设。4家公司此举旨在加快EV和PHV的普及工作。
1900/1/1 0:00:00为实现纯电动汽车在京津两地无障碍运行,天津市东丽和徐官屯高速公路服务区的充换电站日前已开工建设。
1900/1/1 0:00:00第一电动网(作者胡笑菲)关于特斯拉ModelS在中国的交车日期一传再传,4月11日,作者致电特斯拉销售获悉,中国最早的一批ModelS预定客户将会在4月底拿到车,
1900/1/1 0:00:00纯电动汽车享受的政策扶持“特权”或将被打破。
1900/1/1 0:00:004月11日,“自律创新促发展小型纯电动汽车创新论坛”在位于山东淄博的唐骏汽车集团举行。
1900/1/1 0:00:00