许多公司已经开始提供自己的汽车,可以在公园、校园、景点和固定公交线路等有限的环境中载客。在他们的产品宣传中,我们经常可以看到“无人驾驶”这个高频词,不小心收到十几个“未来来了”的兴奋和喜悦!
嘿,等一下,只要方向盘后面没有司机,我们就能实现全自动驾驶的梦想吗?

(注:本文中所有的“全自动驾驶”都是指SAE L4-L5的自动化程度。)
带着这个问题,车云观察了国内外几家典型的公司,并进行了一些分析和比较。
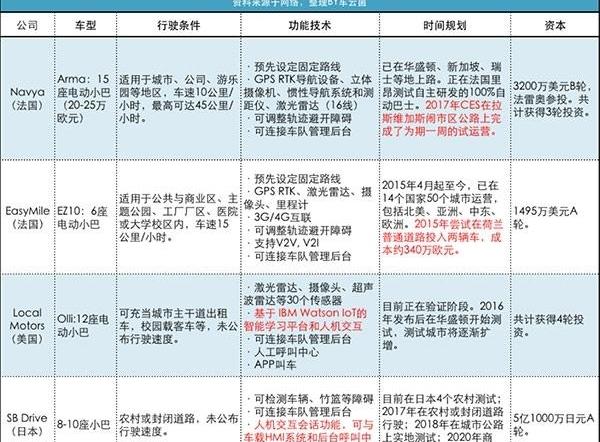
我们发现,许多在国外载客的无人驾驶汽车已经在城市公共道路上行驶。Waymo pod car和英国的Lutz Pathfinder这两款车在现阶段似乎并不特别受欢迎,主要是因为考虑到性价比、传感器和冗余设计以确保安全会增加许多额外成本(从下表来看,一辆车仍然相当昂贵)。大量新闻的主角是小巴,相对知名的供应商是法国的Navya和EasyMile、美国的Local Motors和日本的SB Drive。

从左到右,从上到下:Arma、EZ10、Olli、SB Drive小巴,图片来自网络。
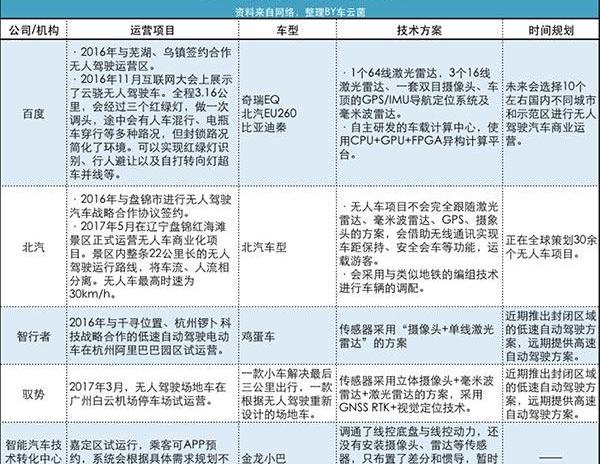
国内无人驾驶汽车主要在景区、公园、停车场等有限的封闭区域运营,包括传统汽车、小型双座车和小型客车。大型互联网公司、主机厂和研究机构已经启动了相关项目,百度和北汽是代表公司,智行哲和驭势科技是主要的启动公司,IVTTC是另一家研究机构。

从左到右,从上到下:百度、北汽、智行、驭势、IVTTC的无人车,部分图片来自网络。
还有一些企业利用机电控制技术曲线,通过安装磁钉、磁传感器阵列、导轨等磁导向装置,实现无人驾驶。当这些车开始在路上忙碌时,我们能高兴吗?答案当然是否定的。
首先,一辆汽车是否是全自动的并不是由是否有司机来判断的。
在SAE标准(J 30162016版本自动驾驶汽车的定义和分类)中,尽管全自动驾驶确实可以摆脱驾驶员,但一辆名副其实的“自动驾驶”汽车在实时驾驶过程中必须持续满足以下所有动作:
1.通过转向对车辆进行横向控制。
2.通过加速和减速来控制车辆的纵向运动。
3.通过监测、识别和分类障碍物和事件来监测驾驶环境,并为应对做好准备。
4.根据障碍物和道路事件做出反应。
5.制定车辆移动计划
6.通过灯光、信号和手势等方式向外界传递车辆信息。
目前,我们看到的无人驾驶汽车虽然可以监测环境,做出决策和计划,并最终做出相应的操作,但还不够全面。从技术上讲,这些汽车仍然无法像人类驾驶员那样灵活地应对各种情况。我们可以看到,在试运行过程中,人们对车辆的自动驾驶技术不够自信。当一些汽车进入新城市时,他们不得不安排专人按下紧急制动按钮。还有一些汽车正在试运行,司机会坐在驾驶座上徒劳地握住方向盘以防万一。
最重要的是,区分全自动驾驶汽车和驾驶员辅助的关键是,当系统无法工作或超出系统的原始操作设计范围时,系统不会依赖人类,并尽最大努力以安全的方式解决问题。不幸的是,在推出产品时,这些公司都回避了当系统出现故障或超出其能力时,他们是否可以自己拯救这一天。然而,系统稳健性是衡量安全性的重要标准,无法通过短期经验进行测试。
其次,我们应该理解“有限的环境”是什么意思。
由于自动驾驶系统不够可靠,它将确保在简单的环境中安全运行。是否有必要定义环境是L4和L5之间的分界线。以下不是SAE提到的一些资格的完整列表,例如:
速度(高速,……
低速等)
地理地形(平原、山脉等)
道路路面状况(笔直道路、绕行道路等)
环境(天气、气候、基础设施等)
交通状况(简单、复杂、违法行为、固定路线等)
时间段(白天、晚上)
……
当然,L4级自动驾驶汽车可以设置多个有限的环境,这些环境可以自由组合。例如,它只在白天低速行驶,路上没有行人,因此出现了各种条件有限的自动驾驶汽车。然而,限制设计操作范围将让我们看到自动驾驶系统离L5有多远。如果L4级自动驾驶汽车设置了许多限制,这意味着它仍有许多技术问题需要解决。
例如,许多无人车通过各种限制来简化驾驶难度。这些无人驾驶汽车行驶速度很慢,因此系统的实时计算能力不是很高。汽车在同一条路线上通勤,所以没有必要考虑太多的道路变化。车辆也采用相对安全的应对策略。例如,人们很少超车和变道,他们会尽力停车和避让。
在上述情况下,路况简单,环境可控,只在白天行驶,表明传感器和算法无法胜任夜间工作。车辆只能在封闭的公园内行驶,因此高精度地图不会过多考虑高频更新。例如,驾驶环境中永远不应该有人,也不应该有车,这表明在应对复杂路况的感知和决策方面仍有问题需要解决。自动驾驶仍有10%的道路,但剩下的10%需要90%的时间和成本。
此外,我们可以看到,在商业化问题上,它绝不是一家公司来做所有的工作。车企、交通信息公司、解决方案提供商和运营商都将全链条参与,为了获得足够的利润空间,他们将尽力掌握核心数据资源。数据的积累和算法的训练本来就是一个漫长的过程。
总结
自动驾驶可以在不同阶段找到商业途径,让企业通过盈利获得良性发展资本。然而,当行业进入自动驾驶发展的关键时期时,我们不应该忙于给产品贴上“无人驾驶”的标签,而应该多谈谈一些困难的解决方案,让自动驾驶产品在现实生活中给我们带来安全舒适的驾驶体验。许多公司已经开始提供自己的汽车,可以在公园、校园、景点和固定公交线路等有限的环境中载客。在他们的产品宣传中,我们经常可以看到“无人驾驶”这个高频词,不小心收到十几个“未来来了”的兴奋和喜悦!
嘿,等一下,只要方向盘后面没有司机,我们就能实现全自动驾驶的梦想吗?
(注:本文中所有的“全自动驾驶”都是指SAE L4-L5的自动化程度。)
带着这个问题,车云观察了国内外几家典型的公司,并进行了一些分析和比较。
我们发现,许多在国外载客的无人驾驶汽车已经在城市公共道路上行驶。Waymo pod car和英国的Lutz Pathfinder这两款车在现阶段似乎并不特别受欢迎,主要是因为考虑到性价比、传感器和冗余设计以确保安全会增加许多额外成本(从下表来看,一辆车仍然相当昂贵)。大量新闻的主角是小巴,相对知名的供应商是法国的Navya和EasyMile、美国的Local Motors和日本的SB Drive。
从左到右,从上到下:Arma、EZ10、Olli、SB Drive小巴,图片来自网络。
国内无人驾驶汽车主要在景区、公园、停车场等有限的封闭区域运营,包括传统汽车、小型双座车和小型客车。大型互联网公司、主机厂和研究机构已经启动了相关项目,百度和北汽是代表公司,智行哲和驭势科技是主要的启动公司,IVTTC是另一家研究机构。
从左到右,从上到下:百度、北汽、智行、驭势、IVTTC的无人车,部分图片来自网络。
还有一些企业利用机电控制技术曲线,通过安装磁钉、磁传感器阵列、导轨等磁导向装置,实现无人驾驶。当这些车开始在路上忙碌时,我们能高兴吗?答案当然是否定的。
首先,一辆汽车是否是全自动的并不是由是否有司机来判断的。
在SAE标准(J 30162016版本自动驾驶汽车的定义和分类)中,尽管全自动驾驶确实可以摆脱驾驶员,但一辆名副其实的“自动驾驶”汽车在实时驾驶过程中必须持续满足以下所有动作:
1.通过转向对车辆进行横向控制。
2.通过加速和减速来控制车辆的纵向运动。
3.通过监测、识别和分类障碍物和事件来监测驾驶环境,并为应对做好准备。
4.根据障碍物和道路事件做出反应。
5.制定车辆移动计划
6.通过灯光、信号和手势等方式向外界传递车辆信息。
目前,我们看到的无人驾驶汽车虽然可以监测环境,做出决策和计划,并最终做出相应的操作,但还不够全面。从技术上讲,这些汽车仍然无法像人类驾驶员那样灵活地应对各种情况。我们可以看到,在试运行过程中,人们对车辆的自动驾驶技术不够自信。当一些汽车进入新城市时,他们不得不安排专人按下紧急制动按钮。还有一些汽车正在试运行,司机会坐在驾驶座上徒劳地握住方向盘以防万一。
最重要的是,区分全自动驾驶汽车和驾驶员辅助的关键是,当系统无法工作或超出系统的原始操作设计范围时,系统不会依赖人类,并尽最大努力以安全的方式解决问题。不幸的是,在推出产品时,这些公司都回避了当系统出现故障或超出其能力时,他们是否可以自己拯救这一天。然而,系统稳健性是衡量安全性的重要标准,无法通过短期经验进行测试。
其次,我们应该理解“有限的环境”是什么意思。
由于自动驾驶系统不够可靠,它将确保在简单的环境中安全运行。是否有必要定义环境是L4和L5之间的分界线。以下不是SAE提到的一些资格的完整列表,例如:
速度(高速,……
低速等)
地理地形(平原、山脉等)
道路路面状况(笔直道路、绕行道路等)
环境(天气、气候、基础设施等)
交通状况(简单、复杂、违法行为、固定路线等)
时间段(白天、晚上)
……
当然,L4级自动驾驶汽车可以设置多个有限的环境,这些环境可以自由组合。例如,它只在白天低速行驶,路上没有行人,因此出现了各种条件有限的自动驾驶汽车。然而,限制设计操作范围将让我们看到自动驾驶系统离L5有多远。如果L4级自动驾驶汽车设置了许多限制,这意味着它仍有许多技术问题需要解决。
例如,许多无人车通过各种限制来简化驾驶难度。这些无人驾驶汽车行驶速度很慢,因此系统的实时计算能力不是很高。汽车在同一条路线上通勤,所以没有必要考虑太多的道路变化。车辆也采用相对安全的应对策略。例如,人们很少超车和变道,他们会尽力停车和避让。
在上述情况下,路况简单,环境可控,只在白天行驶,表明传感器和算法无法胜任夜间工作。车辆只能在封闭的公园内行驶,因此高精度地图不会过多考虑高频更新。例如,驾驶环境中永远不应该有人,也不应该有车,这表明在应对复杂路况的感知和决策方面仍有问题需要解决。自动驾驶仍有10%的道路,但剩下的10%需要90%的时间和成本。
此外,我们可以看到,在商业化问题上,它绝不是一家公司来做所有的工作。车企、交通信息公司、解决方案提供商和运营商都将全链条参与,为了获得足够的利润空间,他们将尽力掌握核心数据资源。数据的积累和算法的训练本来就是一个漫长的过程。
总结
自动驾驶可以在不同阶段找到商业途径,让企业通过盈利获得良性发展资本。然而,当行业进入自动驾驶发展的关键时期时,我们不应该忙于给产品贴上“无人驾驶”的标签,而应该多谈谈一些困难的解决方案,让自动驾驶产品在现实生活中给我们带来安全舒适的驾驶体验。
标签:发现
共享汽车领域是个规模经济,市场规模如网点覆盖密度、运营的车辆数量与企业运营成本成反比。
1900/1/1 0:00:00尾号限行措施将继续实施一年,北京市政府近日发布通告,决定自2017年4月10日至2018年4月8日,继续实施工作日高峰时段区域限行交通管理措施。
1900/1/1 0:00:00据《日本经济新闻》3月23日报道,日本丰田汽车与日本通信运营商NTT将就汽车的超高速无线通信技术方面开展合作。双方将利用5G技术,尽快推动安全性更高的自动驾驶汽车实现实用化。
1900/1/1 0:00:00格力电器年报披露前夕,董明珠再度增持珠海银隆。珠海市工商局公开信息显示,董明珠个人出资金额已达1927亿元,持股比例上升为1746,超过阳光人寿成为第二大股东,仅次于广东银通的26。
1900/1/1 0:00:002017年4月6日,中国化学与物理电源行业协会简称协会和动力电池应用分会共同组织的“《锂离子电池企业安全生产规范》协会标准工作组启动会”在天津召开。
1900/1/1 0:00:002014年,Cubic曾与奥迪合作打造奥迪的智能网联信息娱乐系统。
1900/1/1 0:00:00