今年7月5日,百度正式发布Apollo项目。在接下来的一段时间里,这个自动驾驶生态项目在国内外引起了极大的讨论和解读,成为许多汽车和自动驾驶从业者必须谈论的话题。“你觉得阿波罗计划怎么样?它可靠吗?如果有一个搜索引擎可以覆盖我们的日常对话和文本交流,这个问题的搜索结果一定是巨大的。根据百度给出的数据,在过去的两个月里,阿波罗计划增加6.5万行开源代码,他们今天也带来了这个计划的最新变化:阿波罗1.5正式发布释放。为什么选择阿波罗1.5号?持续关注这个项目的同学应该记得,在7月5日的发布会上,百度展示了Apollo的技术全景,但当时他们实际上打开了Apollo1.0版本,可以实现封闭场馆的跟踪和自动驾驶能力。根据他们当时给出的时间表,2017年9月,开放固定车道的自动驾驶能力,到2017年12月,开放简单城市路况的自动驾驶功能,这就是Apollo 2.0。

他们这次开发的阿波罗1.5实际上打开了固定车道自动驾驶的能力。换句话说,除了人们经常提到的1.0和2.0版本外,今天发布的1.5版本实际上在百度的计划中,它不是一个“临时想法”。在技术层面具体开放了什么?此时,有必要跳出经典的阿波罗技术架构图。让我们回顾一下1.0和2.0版本的路线图:1.0,蓝色方框是打开的能力:

2.0,与1.0相比,增加了紫色盒子的内容:

阿波罗1.5号的路线图是这样的,黄色部分是这次开放的:

可以看出,在开源软件平台层面,此次开放了Map Engine、Perception、Planning和端到端深度学习四大功能。在云服务平台层面,此次开放了高清地图和模拟平台两部分。在硬件方面,Apollo已经开放了对激光雷达的支持。将这些功能添加到1.0版本中开发的功能中,Apollo 1.5可以实现的功能是“固定车道昼夜自动驾驶”,也就是说,如果你想做基于Apollo开源代码的自动驾驶,你可以在1.5版本中使用这套东西,让你的车在单车道上实现自动驾驶和跟车功能。请允许我跳下话题:百度,阿波罗1.5号会议,技术性很强。如果不是对自动驾驶技术有深入研究的记者,可能会感到非常眩晕。当然,出席新闻发布会的不仅是媒体,合作伙伴和潜在合作伙伴也可能“喜欢”听到这句话。但这里仍然有必要对技术方面的内容进行分解。让我们看看1.5版本的五大功能:障碍感知、决策规划、云模拟、高精度地图服务和端到端深度学习。在Apollo平台研发负责人王京奥看来,前四项能力“如期开放”,在Apollo1.5开启端到端深度学习能力有点“出乎意料”。在我看来,开放能力的选择是由每个阶段的目标决定的。从1.0的封闭场自动跟踪到1.5的固定车道自动驾驶,必须开放障碍感知、决策规划、模拟测试和高精度地图的能力,否则很难实现1.5的目标。让我们先谈谈障碍感知。根据百度的说法,这种能力是建立在深度学习的基础上的。具体原理是通过Velodyne的64线激光雷达采集周围环境的点云数据,然后使用NVIDIA的GPU通过CUDA、CuDNN和Caffe技术准确识别障碍物。一方面,它可以预测障碍物的行为。另一方面,Apollo将提供不同的算法来适应不同的障碍。

这也解释了为什么百度应该在Apollo中开放对激光雷达的支持……
5.作为百度投资的公司,Velodyne今天也在现场发布消息:他们在中国正式上市了32线激光雷达产品VLP-32C(请记住,它是32C)。此外,对于Apollo生态会员,Velodyne还将提供“特殊服务”:如果这些公司需要在自己的自动驾驶测试车上安装激光雷达,Velodyn将提供更短的交付周期、特殊的技术支持,当然还有“生态会员专享价”。

决策规划:系统可以对无人车收集的数据进行过滤和聚合,并在决策规划模块中重构这些数据。基于此,使用不同的优化器来绘制无人车最安全、最平滑的行驶路径。仔细看图片,理解的学生自然会理解:

端到端深度学习:采用卷积神经网络和基于深度学习的创新神经网络。

高精度地图:这是实现自动驾驶的基础之一。此前,我们也用一篇文章介绍了百度高精地图的具体采集和制作过程。百度认为,他们的高精度地图有三个核心优势:高精度、高生产效率和广覆盖。百度的目标是,到2020年,Apollo高精度地图将覆盖全国所有高等级道路和城市重点道路。目前,全国高速公路和特定城市道路的高精度地图已经开放,精度达到15-20厘米。云模拟:百度称其为自动驾驶的“加速器”。其意义在于,“虚拟路测”可以在模拟平台上进行,而无需在自动驾驶仪上进行实际路测,从而达到快速训练算法和积累数据的目的,节约成本,提高效率,快速迭代。
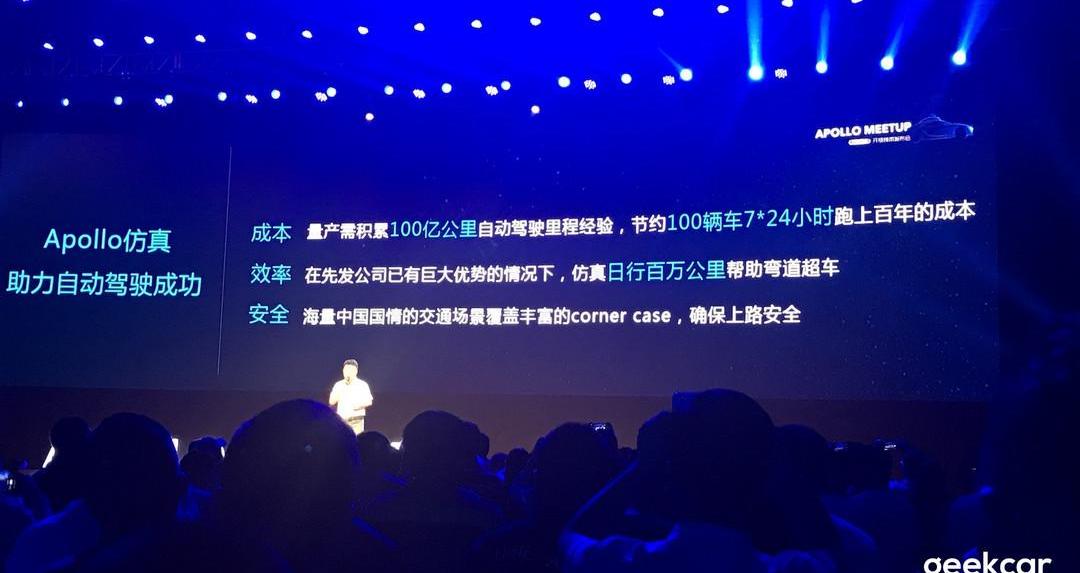
阿波罗模拟平台的优势在于内置高精度地图、海量场景、云计算能力和专业的测量系统(测量系统也称为“裁判”,用于评估测试的算法水平)。根据百度给出的信息,阿波罗模拟平台的虚拟计算能力可以达到“每天一百万公里”。好吧,这就是这些新的开放能力的引入。说实话,百度在发布会上提供的信息比我写的多得多,他们对每一项能力都做了非常详细的解释。如果你是自动驾驶技术的开发者,你可以访问Apollo的官方网站了解更多信息。如果你是一个吃瓜群众,对这一部分有一个基本的了解就足够了。当然,还有另一种可能性:作为一个吃瓜群众,也许你看完这些东西后,想去DIY一辆自动驾驶汽车?在谈到技术之后,让我们谈谈阿波罗更宏观的东西。“开发者”一词被百度反复提及。作为一个开放的自动驾驶程序,开发人员的重要性不言而喻。如果你不太理解,你可以参考Android的例子。用百度的话来说,开发者的成功就是阿波罗项目的成功。在发布会上,三位“开发者”分别从不同角度讲述了他们的经历,分别是金龙客车、Momenta和智行哲科技。金龙修改了一辆6米长的公交车的硬件,并注入了阿波罗1.0的代码,使车辆能够在一周内在封闭的地方进行跟踪。这也标志着阿波罗应用从乘用车扩展到商用车。Momenta和智智提供了Apollo 1.5的两个应用案例。Momenta首席执行官曹旭东表示,他们基于Apollo1.5的自动驾驶测试车可以准确识别前方车辆突然并线、行人和自行车在白天和晚上过马路等交通场景。当道路上出现垃圾桶、大型犬和纸箱等非典型交通场景时,车辆也可以做出准确的判断,并提供安全稳定的驾驶决策。Momenta和Apollo的合作主要是验证障碍物识别和激光雷达传感的能力。至于明智的步行者,他们与阿波罗的合作主要基于高精度地图和云模拟。目前,一辆“无人扫路车”已经投入北京的一个公园,智能旅行者为它提供了……
h一种无人化解决方案,利用Apollo的高精度地图和定位服务,实现自动避障、自主跟踪、定点启停、自主清扫等功能。此外,智能出行者还利用云模拟平台进行了自动驾驶模拟测试。据百度介绍,经过两个多月的发展,Apollo Eco的合作伙伴数量已增至约70家。至于整个Apollo开发者生态的构成,可以通过百度副总裁吴学斌在现场展示的一张图片来说明:

事实上,从1.0到未来的1.5到2.0,可以看出百度非常重视Apollo的迭代能力,并做出了一个可能不合适的比喻,这有点像特斯拉的OTA远程更新。作为Apollo Ecology的合作伙伴,不断获得自动驾驶能力的更新可能是一个“活力”的问题。当被问及Apollo是如何盈利的时,吴学斌的回答简短但有意义:他没有在现有的价值链中淘金,而是从云端提供服务。今年7月5日,百度正式发布Apollo项目。在接下来的一段时间里,这个自动驾驶生态项目在国内外引起了极大的讨论和解读,成为许多汽车和自动驾驶从业者必须谈论的话题。“你觉得阿波罗计划怎么样?它可靠吗?如果有一个搜索引擎可以覆盖我们的日常对话和文本交流,这个问题的搜索结果一定是巨大的。根据百度给出的数据,在过去的两个月里,阿波罗计划增加6.5万行开源代码,他们今天也带来了这个计划的最新变化:阿波罗1.5正式发布释放。为什么选择阿波罗1.5号?持续关注这个项目的同学应该记得,在7月5日的发布会上,百度展示了Apollo的技术全景,但当时他们实际上打开了Apollo1.0版本,可以实现封闭场馆的跟踪和自动驾驶能力。根据他们当时给出的时间表,2017年9月,开放固定车道的自动驾驶能力,到2017年12月,开放简单城市路况的自动驾驶功能,这就是Apollo 2.0。
他们这次开发的阿波罗1.5实际上打开了固定车道自动驾驶的能力。换句话说,除了人们经常提到的1.0和2.0版本外,今天发布的1.5版本实际上在百度的计划中,它不是一个“临时想法”。在技术层面具体开放了什么?此时,有必要跳出经典的阿波罗技术架构图。让我们回顾一下1.0和2.0版本的路线图:1.0,蓝色方框是打开的能力:
2.0,与1.0相比,增加了紫色盒子的内容:
阿波罗1.5号的路线图是这样的,黄色部分是这次开放的:
可以看出,在开源软件平台层面,此次开放了Map Engine、Perception、Planning和端到端深度学习四大功能。在云服务平台层面,此次开放了高清地图和模拟平台两部分。在硬件方面,Apollo已经开放了对激光雷达的支持。将这些功能添加到1.0版本中开发的功能中,Apollo 1.5可以实现的功能是“固定车道昼夜自动驾驶”,也就是说,如果你想做基于Apollo开源代码的自动驾驶,你可以在1.5版本中使用这套东西,让你的车在单车道上实现自动驾驶和跟车功能。请允许我跳下话题:百度,阿波罗1.5号会议,技术性很强。如果不是对自动驾驶技术有深入研究的记者,可能会感到非常眩晕。当然,出席新闻发布会的不仅是媒体,合作伙伴和潜在合作伙伴也可能“喜欢”听到这句话。但这里仍然有必要对技术方面的内容进行分解。让我们看看1.5版本的五大功能:障碍感知、决策规划、云模拟、高精度地图服务……
ce和端到端深度学习。在Apollo平台研发负责人王京奥看来,前四项能力“如期开放”,在Apollo1.5开启端到端深度学习能力有点“出乎意料”。在我看来,开放能力的选择是由每个阶段的目标决定的。从1.0的封闭场自动跟踪到1.5的固定车道自动驾驶,必须开放障碍感知、决策规划、模拟测试和高精度地图的能力,否则很难实现1.5的目标。让我们先谈谈障碍感知。根据百度的说法,这种能力是建立在深度学习的基础上的。具体原理是通过Velodyne的64线激光雷达采集周围环境的点云数据,然后使用NVIDIA的GPU通过CUDA、CuDNN和Caffe技术准确识别障碍物。一方面,它可以预测障碍物的行为。另一方面,Apollo将提供不同的算法来适应不同的障碍。
这也解释了为什么百度应该在Apollo 1.5中开放对激光雷达的支持。作为百度投资的公司,Velodyne今天也在现场发布消息:他们在中国正式上市了32线激光雷达产品VLP-32C(请记住,它是32C)。此外,对于Apollo生态会员,Velodyne还将提供“特殊服务”:如果这些公司需要在自己的自动驾驶测试车上安装激光雷达,Velodyn将提供更短的交付周期、特殊的技术支持,当然还有“生态会员专享价”。
决策规划:系统可以对无人车收集的数据进行过滤和聚合,并在决策规划模块中重构这些数据。基于此,使用不同的优化器来绘制无人车最安全、最平滑的行驶路径。仔细看图片,理解的学生自然会理解:
端到端深度学习:采用卷积神经网络和基于深度学习的创新神经网络。
高精度地图:这是实现自动驾驶的基础之一。此前,我们也用一篇文章介绍了百度高精地图的具体采集和制作过程。百度认为,他们的高精度地图有三个核心优势:高精度、高生产效率和广覆盖。百度的目标是,到2020年,Apollo高精度地图将覆盖全国所有高等级道路和城市重点道路。目前,全国高速公路和特定城市道路的高精度地图已经开放,精度达到15-20厘米。云模拟:百度称其为自动驾驶的“加速器”。其意义在于,“虚拟路测”可以在模拟平台上进行,而无需在自动驾驶仪上进行实际路测,从而达到快速训练算法和积累数据的目的,节约成本,提高效率,快速迭代。
阿波罗模拟平台的优势在于内置高精度地图、海量场景、云计算能力和专业的测量系统(测量系统也称为“裁判”,用于评估测试的算法水平)。根据百度给出的信息,阿波罗模拟平台的虚拟计算能力可以达到“每天一百万公里”。好吧,这就是这些新的开放能力的引入。说实话,百度在发布会上提供的信息比我写的多得多,他们对每一项能力都做了非常详细的解释。如果你是自动驾驶技术的开发者,你可以访问Apollo的官方网站了解更多信息。如果你是一个吃瓜群众,对这一部分有一个基本的了解就足够了。当然,还有另一种可能性:作为一个吃瓜群众,也许你看完这些东西后,想去DIY一辆自动驾驶汽车?在谈到技术之后,让我们谈谈阿波罗更宏观的东西。“开发者”一词被百度反复提及。作为一个开放的自动驾驶程序,开发人员的重要性不言而喻。如果你不太理解,你可以参考Android的例子。用百度的话来说,开发者的成功就是阿波罗的成功……
项目。在发布会上,三位“开发者”分别从不同角度讲述了他们的经历,分别是金龙客车、Momenta和智行哲科技。金龙修改了一辆6米长的公交车的硬件,并注入了阿波罗1.0的代码,使车辆能够在一周内在封闭的地方进行跟踪。这也标志着阿波罗应用从乘用车扩展到商用车。Momenta和智智提供了Apollo 1.5的两个应用案例。Momenta首席执行官曹旭东表示,他们基于Apollo1.5的自动驾驶测试车可以准确识别前方车辆突然并线、行人和自行车在白天和晚上过马路等交通场景。当道路上出现垃圾桶、大型犬和纸箱等非典型交通场景时,车辆也可以做出准确的判断,并提供安全稳定的驾驶决策。Momenta和Apollo的合作主要是验证障碍物识别和激光雷达传感的能力。至于明智的步行者,他们与阿波罗的合作主要基于高精度地图和云模拟。目前,一辆“无人扫路车”已在北京的一个公园投入使用,智能出行者为其提供了无人解决方案,其中利用Apollo的高精度地图和定位服务,实现自动避障、自主跟踪、定点启停、自主扫路等功能。此外,智能出行者还利用云模拟平台进行了自动驾驶模拟测试。据百度介绍,经过两个多月的发展,Apollo Eco的合作伙伴数量已增至约70家。至于整个Apollo开发者生态的构成,可以通过百度副总裁吴学斌在现场展示的一张图片来说明:
事实上,从1.0到未来的1.5到2.0,可以看出百度非常重视Apollo的迭代能力,并做出了一个可能不合适的比喻,这有点像特斯拉的OTA远程更新。作为Apollo Ecology的合作伙伴,不断获得自动驾驶能力的更新可能是一个“活力”的问题。当被问及Apollo是如何盈利的时,吴学斌的回答简短但有意义:他没有在现有的价值链中淘金,而是从云端提供服务。
9月21日早间消息,谷歌自动驾驶汽车部门Waymo起诉Uber窃取商业机密,据路透报道,该公司向Uber索赔26亿美元。周三时,旧金山联邦法院举行听证会,Waymo在听证会上给出索赔金额。
1900/1/1 0:00:00近日新能源汽车股票集体走高、董小姐的造车梦也不断曝出新动向、中汽协宣布8月份新能源汽车销量同比增长763无论是市场表现还是国家的政策支持,都表明新能源汽车将成为未来的主流车型。
1900/1/1 0:00:009月19日,贵州省印发的《贵州省支持电动汽车充电基础设施加快建设若干政策措施》明确,贵州省将加快推进充电设施上高速公路,到2018年底,
1900/1/1 0:00:00近日,海南省发布《新能源汽车推广应用推荐车型目录2017年第三批》的通知,共有135款新能源车入选,其中乘用车12款,客车91款,货车和专用车32款。
1900/1/1 0:00:00“贵就一个字,奥迪不止说一次。”一汽大众奥迪又整出了新玩法,推出了全新的移动出行服务“Audiondemand移动出行”,又是,又是移动出行,这个名字一看就很洋气。
1900/1/1 0:00:00近日,中山市发布《中山市“十三五”控制温室气体排放工作实施方案的通知》,鼓励使用节能、清洁能源和新能源运输工具,加快充换电等配套基础设施建设。
1900/1/1 0:00:00