刚刚成立达摩院的阿里巴巴,也将进军无人领域?1月14日,记者发现,阿里巴巴首次出现在KITTI道路场景分割榜单上,这是全球最大的一套自动驾驶计算机视觉算法。榜单显示,阿里的人工智能团队iDST赢得了三个细分任务中的第一个,包括两个特定场景任务UU_ROAD(乡村车道)和UMM_ROAD(多车道),以及整个场景的综合评估任务URBAN_ROAD。阿里巴巴向《澎湃新闻》证实了这一消息,但否认阿里将进军自动驾驶业务。阿里表示,公司重视基础科学研究,自动驾驶技术是其中的一部分。这项研究由阿里巴巴的机器视觉科学家任晓峰领导。据了解,KITTI数据集是自动驾驶技术研发的必要平台,图森、驭势、三星、NEC等公司都出现在排行榜上。资料显示,KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国理工学院联合创建,是国际公认的最大的自动驾驶计算机算法评估数据集。KITTI数据集涵盖了五个场景,如城市、住宅区、道路、校园和行人。采用了更适合自动驾驶的BEV(鸟瞰图),包括许多难度很大的无标记道路。据KITTI官网介绍,该评估数据集主要分为场景分割、目标检测、目标跟踪等类别。一位研究人员告诉The Paper,道路场景分割在自动驾驶领域非常重要,主要用于可驾驶区域的划分、自动驾驶路径规划、高精度地图构建和AR(增强现实)导航。
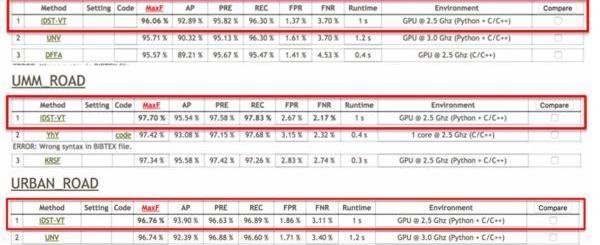
阿里赢得三项细分任务第一来源:KITTI官网截图大多数自动驾驶研究机构可以对城市道路进行大区块的细分,但识别边缘道路仍然非常困难,比如路边停放的石头和车辆。如何对道路边缘进行更精细的分割是目前道路场景分割的主要方向。根据阿里巴巴的一份声明,由任晓峰领导的阿里iDST视觉技术团队提出了一种基于在线难样本挖掘的网络学习方法,同时增加了在线数据增强模块和全局特征与局部特征融合机制,以提高网络特征的表示能力和推广能力,以解决道路边缘和车辆周围道路分割不准确以及道路分割中阴影干扰的问题。经过半年的研究,阿里分别以96.06%和97.70%的分割准确率获得了UU_ROAD(乡村车道)和UMM_ROAD(多车道)的第一名,并以96.76%的准确率获得道路场景分割综合评估任务URBAN_ROAD的第一名。这也是阿里巴巴首次出现在KITTI道路场景细分的名单上。2017年6月,The Paper率先报道了亚马逊排名最高的中国科学家任晓峰加入阿里iDST团队的消息。任晓峰曾领导亚马逊亚马逊Go无人商店算法。当他加入阿里时,他在图像领域的专家中被称赞为非常罕见:“在计算机视觉领域,图像分类、物体识别、跟踪、检测和事件检测都有全面深入的了解。”澎湃新闻记者还发现,在KITTI数据集的其他几项中也可以看到阿里巴巴iDST,包括车辆检测,行人检测和行人重新识别。据介绍,这部分技术已经落地阿里云ET城市大脑场景,目前主要用于城市交通管理。阿里巴巴的科研能力正在上升,它强调对基础科学的研究投资。在2017年杭州云栖大会上,阿里宣布成立探索人类科技未来的实验室“达摩院”,并计划在三年内投资1000多亿元用于新技术,用于涵盖基础科学和颠覆性技术创新的研究。阿里巴巴董事会主席马云希望将“达摩院”视为阿里巴巴留给世界的最好的东西之一。刚刚成立达摩院的阿里巴巴,也将进军无人领域?开……
14日,记者发现,阿里巴巴首次出现在KITTI道路场景分割列表上,这是世界上最大的一套自动驾驶计算机视觉算法。榜单显示,阿里的人工智能团队iDST赢得了三个细分任务中的第一个,包括两个特定场景任务UU_ROAD(乡村车道)和UMM_ROAD(多车道),以及整个场景的综合评估任务URBAN_ROAD。阿里巴巴向《澎湃新闻》证实了这一消息,但否认阿里将进军自动驾驶业务。阿里表示,公司重视基础科学研究,自动驾驶技术是其中的一部分。这项研究由阿里巴巴的机器视觉科学家任晓峰领导。据了解,KITTI数据集是自动驾驶技术研发的必要平台,图森、驭势、三星、NEC等公司都出现在排行榜上。资料显示,KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国理工学院联合创建,是国际公认的最大的自动驾驶计算机算法评估数据集。KITTI数据集涵盖了五个场景,如城市、住宅区、道路、校园和行人。采用了更适合自动驾驶的BEV(鸟瞰图),包括许多难度很大的无标记道路。据KITTI官网介绍,该评估数据集主要分为场景分割、目标检测、目标跟踪等类别。一位研究人员告诉The Paper,道路场景分割在自动驾驶领域非常重要,主要用于可驾驶区域的划分、自动驾驶路径规划、高精度地图构建和AR(增强现实)导航。
阿里赢得三项细分任务第一来源:KITTI官网截图大多数自动驾驶研究机构可以对城市道路进行大区块的细分,但识别边缘道路仍然非常困难,比如路边停放的石头和车辆。如何对道路边缘进行更精细的分割是目前道路场景分割的主要方向。根据阿里巴巴的一份声明,由任晓峰领导的阿里iDST视觉技术团队提出了一种基于在线难样本挖掘的网络学习方法,同时增加了在线数据增强模块和全局特征与局部特征融合机制,以提高网络特征的表示能力和推广能力,以解决道路边缘和车辆周围道路分割不准确以及道路分割中阴影干扰的问题。经过半年的研究,阿里分别以96.06%和97.70%的分割准确率获得了UU_ROAD(乡村车道)和UMM_ROAD(多车道)的第一名,并以96.76%的准确率获得道路场景分割综合评估任务URBAN_ROAD的第一名。这也是阿里巴巴首次出现在KITTI道路场景细分的名单上。2017年6月,The Paper率先报道了亚马逊排名最高的中国科学家任晓峰加入阿里iDST团队的消息。任晓峰曾领导亚马逊亚马逊Go无人商店算法。当他加入阿里时,他在图像领域的专家中被称赞为非常罕见:“在计算机视觉领域,图像分类、物体识别、跟踪、检测和事件检测都有全面深入的了解。”澎湃新闻记者还发现,在KITTI数据集的其他几项中也可以看到阿里巴巴iDST,包括车辆检测,行人检测和行人重新识别。据介绍,这部分技术已经落地阿里云ET城市大脑场景,目前主要用于城市交通管理。阿里巴巴的科研能力正在上升,它强调对基础科学的研究投资。在2017年杭州云栖大会上,阿里宣布成立探索人类科技未来的实验室“达摩院”,并计划在三年内投资1000多亿元用于新技术,用于涵盖基础科学和颠覆性技术创新的研究。阿里巴巴董事会主席马云希望将“达摩院”视为阿里巴巴留给世界的最好的东西之一。
据路透社北京时间1月15日报道,当地时间星期日,美国交通部部长赵小兰(ElaineChao)表示,特朗普政府计划今年夏季颁布修订后的自动驾驶汽车指导方针。
1900/1/1 0:00:00以实现完全自动驾驶为目标,通用汽车在近些年的发展中通过收购、合作等方式不断加强集团自动驾驶技术储备。
1900/1/1 0:00:00据美国媒体1月11日报道,日产曾与美国国家航空航天局NASA合作,针对自动驾驶共同开发SAM无缝自动出行技术平台,目前日产与NASA达成协议,扩大了这一合作项目。
1900/1/1 0:00:00提起采埃孚,绝大多数汽车爱好者都会想起他们的变速箱。8AT、9AT等产品可谓是在业内家喻户晓。
1900/1/1 0:00:00继2016年突破千万辆后,2017年我国汽车召回数量继续增长,同比增幅达77,并连续4年刷新年度召回数量纪录。
1900/1/1 0:00:00Google母公司Alphabet旗下自动驾驶汽车部门Waymo的原型车,最近又被外媒曝光正在旧金山的公共道路上展开测试。
1900/1/1 0:00:00