北京时间3月20日,优步自动驾驶汽车周一撞死一名行人。这是第一起由自动驾驶汽车引发的致命事故,关注度肯定会超过以往的自动驾驶汽车事故。然而,从表面上看,除了整个系统的故障外,很难理解为什么会发生这样的致命事故,因为自动驾驶汽车是为了防止此类事故而设计的。意外进入驾驶路径的人或物几乎是自动驾驶汽车工程师最先考虑的紧急情况。这样的情况有很多,比如突然停下来的汽车、鹿和路人。工程师在设计自动驾驶系统时会尽快找到他们,确认并采取适当措施,可能会减速、停车、绕行等。

优步自动驾驶汽车配备了一组传感器。优步自动驾驶汽车配备了多种不同的成像系统,既可以执行普通任务(监控附近的汽车、标志和车道线),也可以执行特殊任务,例如上述减速措施。在这次事故中,应该有不少于四个图像系统可以拯救受害者。顶部激光雷达是一个位于汽车顶部的桶形物体,是一个激光雷达系统,可以每秒多次生成汽车周围的3D图像。激光雷达使用红外激光脉冲,在遇到物体后会反弹到传感器上,以便在白天或晚上对静止和移动的物体进行相当详细的检测。大雪和大雾会使激光雷达的激光变得模糊,并且精度会随着距离的增加而降低。然而,在几英尺到几百英尺的范围内,顶级激光雷达仍然是一种非常重要的成像工具,几乎存在于每一辆自动驾驶汽车中。
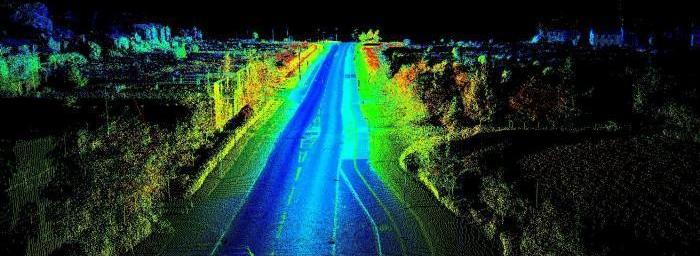
如果顶部激光雷达单元正常运行,并且没有完全遮挡,激光雷达生成的图像应该能够区分受害者。同时,汽车距离行人100多英尺(30多米),行人图像可以传输到“大脑”进行验证。前端雷达和激光雷达一样,发出信号并等待信号反弹,但它使用无线电波而不是激光。这使得雷达具有更强的抗干扰能力,因为无线电可以穿透雪和雾,但也会降低分辨率并改变其距离轮廓。
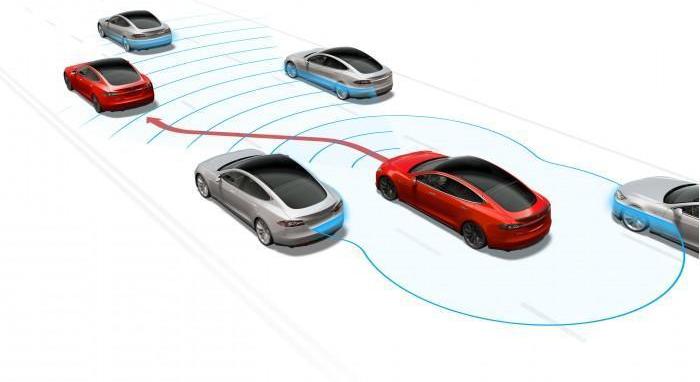
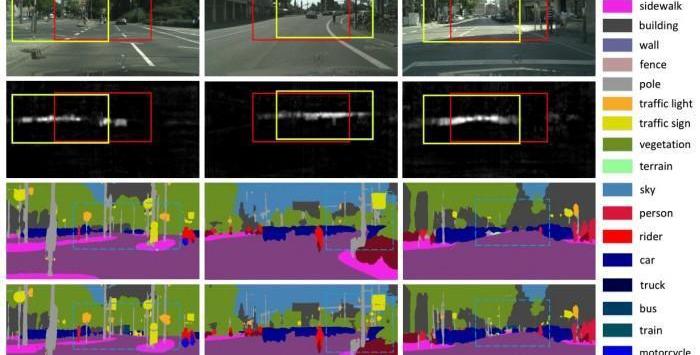
特斯拉的自动驾驶系统主要依靠雷达。根据优步部署的雷达数量,它提供的距离分布可能会有很大不同。优步很可能会在汽车前后部署多个雷达,以实现360度无死角覆盖。如果优步要补充激光雷达,雷达和激光雷达的成像可能会有很大的重叠,但可以使用更多的雷达来探测其他车辆和更大的障碍物。短焦和长焦光学相机激光雷达和雷达很容易确定物体的形状,但它们不善于读取标记和理解物体的颜色。这项任务交给了可见光相机,该相机内置了复杂的计算机视觉算法,可以实时分析成像。优步自动驾驶汽车上的这些摄像头会密切关注刹车(突然红灯)、红绿灯和穿过十字路口的行人的指示标志。特别是,汽车前端将使用多角度、多类型的摄像头,从而获得汽车前方道路的完整图像。检测行人是工程师们试图解决的最常见的问题之一,这种算法已经非常成熟。这个过程通常被称为图像的“分割”,通常涉及标记、树、人的动作等。
光学相机拍摄的图像很难在夜间工作,这是一个明显的问题。然而,这个问题通过前两个系统解决了,激光雷达和雷达可以在夜间工作。即使在不透明的环境中,穿着全黑衣服的人也可以被激光雷达和雷达识别。然后,这些雷达会警告汽车应该减速,或者通过汽车前灯确认行人。这可能就是自动驾驶汽车通常没有夜视系统的原因。安全驾驶人人类非常善于发现障碍物,即使人眼没有激光。人类的反应时间不是最好的,但汽车不会做出反应或错误的反应,经过培训的安全部门会做出正确的……
响应。值得指出的是,自动驾驶汽车中还有一个中央计算单元,可以收集各种传感器提供的信息,然后生成更完整的汽车周围环境图像。目前尚不清楚这起悲剧发生时的具体情况,但优步的自动驾驶汽车必须配备能够检测行人的技术,从而使汽车能够做出正确反应。此外,即使一个系统出现故障,另一个系统也应该能够正常工作。随着优步、当地执法机构和联邦机构对事故的调查,更多细节将被披露。北京时间3月20日,优步自动驾驶汽车周一撞死一名行人。这是第一起由自动驾驶汽车引发的致命事故,关注度肯定会超过以往的自动驾驶汽车事故。然而,从表面上看,除了整个系统的故障外,很难理解为什么会发生这样的致命事故,因为自动驾驶汽车是为了防止此类事故而设计的。意外进入驾驶路径的人或物几乎是自动驾驶汽车工程师最先考虑的紧急情况。这样的情况有很多,比如突然停下来的汽车、鹿和路人。工程师在设计自动驾驶系统时会尽快找到他们,确认并采取适当措施,可能会减速、停车、绕行等。
优步自动驾驶汽车配备了一组传感器。优步自动驾驶汽车配备了多种不同的成像系统,既可以执行普通任务(监控附近的汽车、标志和车道线),也可以执行特殊任务,例如上述减速措施。在这次事故中,应该有不少于四个图像系统可以拯救受害者。顶部激光雷达是一个位于汽车顶部的桶形物体,是一个激光雷达系统,可以每秒多次生成汽车周围的3D图像。激光雷达使用红外激光脉冲,在遇到物体后会反弹到传感器上,以便在白天或晚上对静止和移动的物体进行相当详细的检测。大雪和大雾会使激光雷达的激光变得模糊,并且精度会随着距离的增加而降低。然而,在几英尺到几百英尺的范围内,顶级激光雷达仍然是一种非常重要的成像工具,几乎存在于每一辆自动驾驶汽车中。
如果顶部激光雷达单元正常运行,并且没有完全遮挡,激光雷达生成的图像应该能够区分受害者。同时,汽车距离行人100多英尺(30多米),行人图像可以传输到“大脑”进行验证。前端雷达和激光雷达一样,发出信号并等待信号反弹,但它使用无线电波而不是激光。这使得雷达具有更强的抗干扰能力,因为无线电可以穿透雪和雾,但也会降低分辨率并改变其距离轮廓。
特斯拉的自动驾驶系统主要依靠雷达。根据优步部署的雷达数量,它提供的距离分布可能会有很大不同。优步很可能会在汽车前后部署多个雷达,以实现360度无死角覆盖。如果优步要补充激光雷达,雷达和激光雷达的成像可能会有很大的重叠,但可以使用更多的雷达来探测其他车辆和更大的障碍物。短焦和长焦光学相机激光雷达和雷达很容易确定物体的形状,但它们不善于读取标记和理解物体的颜色。这项任务交给了可见光相机,该相机内置了复杂的计算机视觉算法,可以实时分析成像。优步自动驾驶汽车上的这些摄像头会密切关注刹车(突然红灯)、红绿灯和穿过十字路口的行人的指示标志。特别是,汽车前端将使用多角度、多类型的摄像头,从而获得汽车前方道路的完整图像。检测行人是工程师们试图解决的最常见的问题之一,这种算法已经非常成熟。这个过程通常被称为图像的“分割”,通常涉及标记、树、人的动作等。
光学相机拍摄的图像是……这是一个明显的问题……
办公室要求摄像机在晚上工作。然而,这个问题通过前两个系统解决了,激光雷达和雷达可以在夜间工作。即使在不透明的环境中,穿着全黑衣服的人也可以被激光雷达和雷达识别。然后,这些雷达会警告汽车应该减速,或者通过汽车前灯确认行人。这可能就是自动驾驶汽车通常没有夜视系统的原因。安全驾驶人人类非常善于发现障碍物,即使人眼没有激光。人类的反应时间不是最好的,但汽车不会做出反应或错误的反应,经过培训的安全部门会做出正确的反应。值得指出的是,自动驾驶汽车中还有一个中央计算单元,可以收集各种传感器提供的信息,然后生成更完整的汽车周围环境图像。目前尚不清楚这起悲剧发生时的具体情况,但优步的自动驾驶汽车必须配备能够检测行人的技术,从而使汽车能够做出正确反应。此外,即使一个系统出现故障,另一个系统也应该能够正常工作。随着优步、当地执法机构和联邦机构对事故的调查,更多细节将被披露。
美国时间周日晚上10点左右,Uber的一辆自动驾驶汽车在亚利桑那州Tempe市发生交通事故,与一名正在过马路的行人相撞,行人在送往医院后不治身亡。
1900/1/1 0:00:003月18日,福建省又一家动力电池企业正式投产。作为2018年福建省的重点项目,由福建省招标采购集团投资建设的国内外首创的单体大容量固态聚合物动力锂离子电池一期项目正式投产。
1900/1/1 0:00:002017年全国汽车销量28879万辆,同比仅增长3。与之形成鲜明对比的是去年新能源汽车继续保持较高增长态势,全年销量达777万辆,同比涨幅533。
1900/1/1 0:00:00近日,大众公布了IDRPikesPeak派克峰原形赛车的官图,并将派其参加今年6月举办的派克峰国际爬山赛。
1900/1/1 0:00:003月22日消息,据路透社报道,英国最大的汽车制造商捷豹路虎(JLR)周四在英国街头展示了自动驾驶代客停车技术,该技术允许汽车找到空位并自动停车。
1900/1/1 0:00:003月20日,北京环保局发布《2018年度第四批符合环保排放标准车型目录的公告》,其中包括2018年度第四批电动车型目录。
1900/1/1 0:00:00