如果说人工智能技术将是自动驾驶汽车的大脑,那么硬件系统就是它的神经和四肢。从自动驾驶汽车周边环境信息的采集、传输、处理和反应,到各种复杂场景的分析,硬件系统的建设和升级对自动驾驶汽车来说非常重要。

百度自动驾驶技术部高级产品经理王世峰在Apollo开发者社区分享了关于自动驾驶汽车硬件系统的内容。以下内容来自“Apollo开发者社区”(微信微信公众号:Apollo_Developers),由车云授权编辑。自动驾驶汽车硬件系统概述今天,我将从五个方面为您分享自动驾驶汽车的硬件系统概述内容。我希望通过我的分享,你能对硬件系统的基础有一个全面的了解:1。自动驾驶系统的硬件架构2。自动驾驶传感器3。自动驾驶传感器的产品定义4。自动驾驶的大脑5。自动驾驶汽车的线控系统。

我想每个人都看过这个视频很多次了,所以这里就不播放了。根据美国国家运输安全委员会的调查报告,沃尔沃SUV优步汽车上的传感器在撞击前6秒检测到受害者,事故发生前1.3秒,原车的自动驾驶系统确定有必要采取紧急制动。此时,当车辆处于计算机控制下时,原车的紧急制动功能无法启动。所以司机负责刹车,但司机在事故发生前0.5秒低头看了看视频,没有抬头看路。从事故视频和后续调查报告可以看出,造成事故的主要原因是车辆和驾驶员的缺席。当优步为原车改装自动驾驶系统时,原车的AEB功能执行部分被切断,导致原车的ADAS功能失效。当自动驾驶系统感应到受害者决定执行紧急制动时,没有声音或图像警报。此时,驾驶员正在低头看手机,没有及时接管刹车。目前,大多数自动驾驶研发车辆都是改装车,并在车顶添加了相关传感器,以改变车辆的动态模型;
改装车辆的制动和转向系统也缺乏不同的工作条件和两个冬天和一个夏天的测试。图中,优步研发车是一辆重心更高的SUV。安装在车顶上的设备进一步导致重心向上移动,并且在避免转向的过程中转向过快和过度,在发生碰撞时会比原车更容易侧翻。
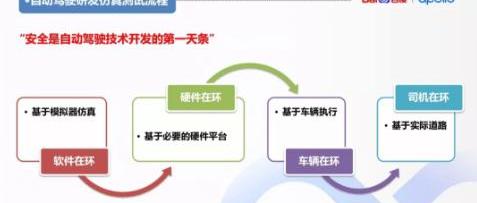
因此,在自动驾驶中,安全是自动驾驶技术发展的第一天。为了减少和避免实际道路测试中的风险,在实际道路测试之前,有必要在封闭的场地内做好模拟、台架测试和测试验证。软件在环,通过软件仿真,构建自动驾驶所需的各种场景,再现真实世界的道路交通环境,然后进行自动驾驶技术的开发和测试。循环中软件的效率取决于模拟软件能够再现场景的程度。模拟交通环境和场景,包括复杂的交通场景、真实的交通流、自然天气(雨、雪、雾、夜、灯等)和各种交通参与者(汽车、摩托车、自行车、行人等)。使用软件模拟交通场景,道路和传感器可以为自动驾驶的环境感知提供丰富的输入,并可以验证和测试算法。硬件在环(硬件在环)和各种传感器类似于人眼和耳朵。作为自动驾驶系统的传感部分,该部分的性能决定了自动驾驶汽车能否适应复杂多变的交通环境。包括一个摄像头、一个毫米波雷达、一个超声波雷达和一个激光雷达。对于不同的传感器,环路中的硬件将根据不同的传感器和环境因素进行部署。当车辆处于环路中时,车辆执行系统向变速器系统发送执行命令以控制车辆,这在自动驾驶中取代了人手和脚。自动驾驶系统的执行和控制决定了车辆能否安全舒适地行驶。车辆在开阔的场地中行驶,自动驾驶系统感知系统模拟的虚拟场景。自动驾驶系统根据虚拟场景发出控制指令,然后通过传感器将车辆的真实轨迹反馈给虚拟环境,从而实现真实车辆和虚拟环境的集成,从而验证车辆的控制。驾驶员在环,基于实时仿真技术开发,结合驾驶员的实际行为,可以实现对车辆和自动驾驶技术开发和测试的主观评价。当驾驶员在身边时,一方面可以得到驾驶员的主观评价,另一方面可以验证人机协同驾驶的功能。第一,自动驾驶系统的硬件架构从整体上看,汽车是一种完全社会化的管理产品,其固有的行业特征相对保守。在人工智能浪潮下,面对造车新势力的冲击和消费者需求的变化,传统汽车行业的渐进式创新方式面临着巨大挑战。迫切需要改变传统的结构和方法,不断创新。自动驾驶的整体硬件架构不仅要考虑系统本身,还要考虑人为因素。

自动驾驶系统主要包括感知、决策和控制三个部分。系统感知、决策和控制的功能需求也应从整个硬件架构中充分考虑。整体设计和生产应符合相关的车辆分类标准,如ISO26262、AECQ-100、TS16949和其他相关认证和标准。目前,L1、L2和ADAS系统的硬件架构和供应链相对完善,满足车辆法规的要求。感知层:它依赖于大量的传感器数据,分为三类:车辆运动、环境感知和驾驶员检测。车辆运动传感器:速度和角度传感器提供车辆线控系统的相关水平和垂直信息。惯性导航+全球定位……
oning系统=集成导航,提供完整的姿态信息参数和高精度定位信息。环境传感传感器:负责环境传感的传感器类似于人类的视觉和听觉。如果没有环境传感传感器的支持,自动驾驶功能将无法实现。它主要依靠激光雷达、相机和毫米波雷达的数据融合,将其提供给计算单元进行算法处理。V2X是指与车辆相关的周围一切事物的通信,包括V2V车辆通信技术、与红绿灯等基础设施的V2I通信技术,以及车辆与行人之间的V2P通信。驾驶员监控传感器:基于摄像头的非接触式和基于生物电传感器的接触式。通过集成在方向盘和仪表板上的传感器,收集驾驶员的面部细节以及心脏、脑电图等部位的数据,然后根据这些部位的数据变化,判断驾驶员是否处于分心和疲劳驾驶状态。计算单元:将各种传感器采集的数据统一到计算单元进行处理。为了保证自动驾驶的实时性要求,软件响应的最大延迟必须在可接受的范围内,这需要非常高的计算量。目前主流的解决方案是基于GPU、FPGA、ASIC等。车辆控制:自动驾驶需要用电信号控制车辆的转向、制动和油门系统,这涉及到车辆现场的线控修改。目前,具有自适应巡航、紧急制动和自动泊车功能的车辆可以直接借用原车的系统,并通过CAN总线进行控制,无需过度修改。警告系统:主要通过声音、图像和振动来提醒驾驶员,并通过HMI的设计有效减少驾驶员的嗜睡和分心行为。第二,自动驾驶的传感器

摄像头:主要用于检测车道线、交通标志、红绿灯、车辆和行人。它的检测信息全面,价格低廉,但会受到雨雪和光线的影响。它由镜头、镜头模块、滤波器、CMOS/CCD、ISP和数据传输部分组成。光通过光学透镜和滤波器后聚焦在传感器上,通过CMOS或CCD集成电路将光信号转换为电信号,然后通过图像处理器(ISP)转换为RAW、RGB或YUV格式的标准数字图像信号,并通过数据传输接口传输到计算机。激光雷达:激光雷达使用的技术是飞行时间法,根据光线遇到障碍物的折返时间计算距离。为了覆盖一定的角度范围,需要进行角度扫描,因此出现了各种扫描原理。主要分为:同轴旋转、棱镜旋转、MEMS扫描、相位型、闪烁型。激光雷达不仅用于感知,还用于绘制和定位高精度地图。它被认为是L3级以上自动驾驶的重要传感器。毫米波雷达:主要用于检测交通车辆。它既快速又准确,而且不容易受到天气的影响。它无法检测车道线上的交通标志。毫米波雷达由芯片、天线和算法组成。基本原理是发射电磁波,观察回波和入射波之间的差异,以计算距离和速度。成像精度的测量指标是距离检测精度、角分辨率和速度差分辨率。毫米波频率越高,带宽越宽,成像越精细,主要分为77GHz和24GHz两种。综合导航:GNSS板通过天线接收来自所有可见GPS卫星和RTK的信号,然后进行解释和计算,以获得自己的空间位置。当车辆通过隧道或在高耸建筑物之间的街道上行驶时,由于信号受阻,存在无法在该信号盲区进行导航的风险。有必要对惯性导航系统的信息进行融合。INS具有全天候、完全自主、不受外部干扰的优点,可以提供完整的导航参数(位置、速度、姿态)。组合后,可以实现比两次独立操作的最佳性能更好的定位和姿态测量性能。第三,刺激……
自动驾驶传感器的定义
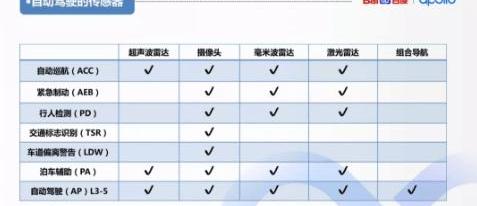
该表总结了常见自动驾驶功能中使用的传感器以及每个传感器的应用。各国还发布了L1和L2自动驾驶功能的相关标准,加速了市场的发展和产品的落地。自2013年以来,欧盟新车安全评估协会(E-NCAP)已将ADAS添加到评分规则中。到2017年,速度辅助系统(SAS)、自动紧急制动(AEB)和车道偏离警告/车道偏离辅助系统(LDW/LKD)的奖金要求将是系统,装机容量将达到100%。美国国家公路交通安全管理局(NHTSA)和公路安全保险协会(IIHS)也提出,2022年应将自动紧急制动(AEB)等ADAS功能纳入技术标准。
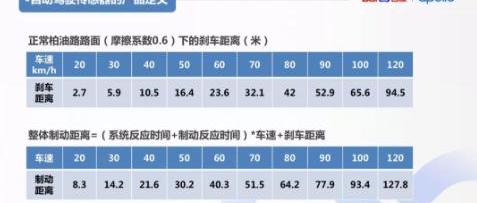
自动驾驶要求仅限于车辆的ODD(操作设计领域),即设计应用范围。城市道路+城际高速公路是自动驾驶汽车的普遍应用范围。中国城市封闭道路的最高限速为80公里/小时,高速公路的限速为120公里/小时。干沥青路面的摩擦系数为0.6。根据制动距离公式计算制动距离:S=V*V/2μ,得到第一行的表格。然后,结合自动驾驶系统和制动系统的反应时间,得到下表。从这两张表中可以看出,制动距离与速度的平方成正比,与摩擦系数成反比。当摩擦系数不变时,制动距离取决于车速。如果车速增加一倍,制动距离将增加到四倍。摩擦系数μ主要与路面材料和天气有关。在中国最高限速150米的情况下,自动驾驶传感器的检测距离可以满足需求。自动驾驶技术的开发人员可以根据实际场景的速度选择所需的传感器,不需要盲目追求传感器的性能来提高整体成本。
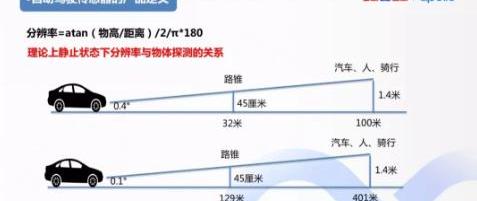
传感器分辨率和物体检测之间的关系可以通过atan反正切函数来计算,图中给出的公式除以2,主要是为了确保当传感器检测时最小角度为最小目标的一半时,在任何情况下都可以覆盖一个像素,以确保分辨率。由于物体不在一个角度内,因此避免漏检。理论上,当分辨率为0.4度时,100米外可以探测到汽车,而当分辨率为0.1度时,400米外可以检测到汽车。然而,仅仅通过检测来识别物体并不意味着它可以被识别。从自动驾驶算法的角度来看,例如,激光雷达物体识别需要4到5条线来识别物体类别。从这个角度来看,如果自动驾驶系统在50米的范围内使用分辨率为0.4度的激光雷达,它真的可以识别汽车。如果说人工智能技术将是自动驾驶汽车的大脑,那么硬件系统就是它的神经和四肢。从自动驾驶汽车周边环境信息的采集、传输、处理和反应,到各种复杂场景的分析,硬件系统的建设和升级对自动驾驶汽车来说非常重要。
百度自动驾驶技术部高级产品经理王世峰在Apollo开发者社区分享了关于自动驾驶汽车硬件系统的内容。以下内容来自“Apollo开发者社区”(微信微信公众号:Apollo_Developers),由车云授权编辑。自动驾驶汽车硬件系统概述今天,我将从五个方面为您分享自动驾驶汽车的硬件系统概述内容。我希望通过我的分享,你能对硬件系统的基础有一个全面的了解:1。自动驾驶系统的硬件架构2。自动驾驶传感器3。自动驾驶传感器的产品定义4。自动驾驶的大脑5。自动驾驶汽车的线控系统。
我想每个人都看到了……
ideo很多次,所以不会在这里播放。根据美国国家运输安全委员会的调查报告,沃尔沃SUV优步汽车上的传感器在撞击前6秒检测到受害者,事故发生前1.3秒,原车的自动驾驶系统确定有必要采取紧急制动。此时,当车辆处于计算机控制下时,原车的紧急制动功能无法启动。所以司机负责刹车,但司机在事故发生前0.5秒低头看了看视频,没有抬头看路。从事故视频和后续调查报告可以看出,造成事故的主要原因是车辆和驾驶员的缺席。当优步为原车改装自动驾驶系统时,原车的AEB功能执行部分被切断,导致原车的ADAS功能失效。当自动驾驶系统感应到受害者决定执行紧急制动时,没有声音或图像警报。此时,驾驶员正在低头看手机,没有及时接管刹车。目前,大多数自动驾驶研发车辆都是改装车,并在车顶添加了相关传感器,以改变车辆的动态模型;
改装车辆的制动和转向系统也缺乏不同的工作条件和两个冬天和一个夏天的测试。图中,优步研发车是一辆重心更高的SUV。安装在车顶上的设备进一步导致重心向上移动,并且在避免转向的过程中转向过快和过度,在发生碰撞时会比原车更容易侧翻。
因此,在自动驾驶中,安全是自动驾驶技术发展的第一天。为了减少和避免实际道路测试中的风险,在实际道路测试之前,有必要在封闭的场地内做好模拟、台架测试和测试验证。软件在环,通过软件仿真,构建自动驾驶所需的各种场景,再现真实世界的道路交通环境,然后进行自动驾驶技术的开发和测试。循环中软件的效率取决于模拟软件能够再现场景的程度。模拟交通环境和场景,包括复杂的交通场景、真实的交通流、自然天气(雨、雪、雾、夜、灯等)和各种交通参与者(汽车、摩托车、自行车、行人等)。使用软件模拟交通场景,道路和传感器可以为自动驾驶的环境感知提供丰富的输入,并可以验证和测试算法。硬件在环(硬件在环)和各种传感器类似于人眼和耳朵。作为自动驾驶系统的传感部分,该部分的性能决定了自动驾驶汽车能否适应复杂多变的交通环境。包括一个摄像头、一个毫米波雷达、一个超声波雷达和一个激光雷达。对于不同的传感器,环路中的硬件将根据不同的传感器和环境因素进行部署。当车辆处于环路中时,车辆执行系统向变速器系统发送执行命令以控制车辆,这在自动驾驶中取代了人手和脚。自动驾驶系统的执行和控制决定了车辆能否安全舒适地行驶。车辆在开阔的场地中行驶,自动驾驶系统感知系统模拟的虚拟场景。自动驾驶系统根据虚拟场景发出控制指令,然后通过传感器将车辆的真实轨迹反馈给虚拟环境,从而实现真实车辆和虚拟环境的集成,从而验证车辆的控制。驾驶员在环,基于实时仿真技术开发,结合驾驶员的实际行为,可以实现对车辆和自动驾驶技术开发和测试的主观评价。当驾驶员在身边时,一方面可以得到驾驶员的主观评价,另一方面可以验证人机协同驾驶的功能。第一,自动驾驶系统的硬件架构从整体上看,汽车是一种完全社会化的管理产品,其固有的行业特征相对保守。在人工智能浪潮下,面对造车新势力的冲击和消费者需求的变化,传统汽车行业的渐进式创新方式面临着巨大挑战。迫切需要改变传统的结构和方法,不断创新。自动驾驶的整体硬件架构不仅要考虑系统本身,还要考虑人为因素。
自动驾驶系统主要包括感知、决策和控制三个部分。系统感知、决策和控制的功能需求也应从整个硬件架构中充分考虑。整体设计和生产应符合相关的车辆分类标准,如ISO26262、AECQ-100、TS16949和其他相关认证和标准。目前,L1、L2和ADAS系统的硬件架构和供应链相对完善,满足车辆法规的要求。感知层:它依赖于大量的传感器数据,分为三类:车辆运动、环境感知和驾驶员检测。车辆运动传感器:速度和角度传感器提供车辆线控系统的相关水平和垂直信息。惯性导航+全球定位……
oning系统=集成导航,提供完整的姿态信息参数和高精度定位信息。环境传感传感器:负责环境传感的传感器类似于人类的视觉和听觉。如果没有环境传感传感器的支持,自动驾驶功能将无法实现。它主要依靠激光雷达、相机和毫米波雷达的数据融合,将其提供给计算单元进行算法处理。V2X是指与车辆相关的周围一切事物的通信,包括V2V车辆通信技术、与红绿灯等基础设施的V2I通信技术,以及车辆与行人之间的V2P通信。驾驶员监控传感器:基于摄像头的非接触式和基于生物电传感器的接触式。通过集成在方向盘和仪表板上的传感器,收集驾驶员的面部细节以及心脏、脑电图等部位的数据,然后根据这些部位的数据变化,判断驾驶员是否处于分心和疲劳驾驶状态。计算单元:将各种传感器采集的数据统一到计算单元进行处理。为了保证自动驾驶的实时性要求,软件响应的最大延迟必须在可接受的范围内,这需要非常高的计算量。目前主流的解决方案是基于GPU、FPGA、ASIC等。车辆控制:自动驾驶需要用电信号控制车辆的转向、制动和油门系统,这涉及到车辆现场的线控修改。目前,具有自适应巡航、紧急制动和自动泊车功能的车辆可以直接借用原车的系统,并通过CAN总线进行控制,无需过度修改。警告系统:主要通过声音、图像和振动来提醒驾驶员,并通过HMI的设计有效减少驾驶员的嗜睡和分心行为。第二,自动驾驶的传感器
摄像头:主要用于检测车道线、交通标志、红绿灯、车辆和行人。它的检测信息全面,价格低廉,但会受到雨雪和光线的影响。它由镜头、镜头模块、滤波器、CMOS/CCD、ISP和数据传输部分组成。光通过光学透镜和滤波器后聚焦在传感器上,通过CMOS或CCD集成电路将光信号转换为电信号,然后通过图像处理器(ISP)转换为RAW、RGB或YUV格式的标准数字图像信号,并通过数据传输接口传输到计算机。激光雷达:激光雷达使用的技术是飞行时间法,根据光线遇到障碍物的折返时间计算距离。为了覆盖一定的角度范围,需要进行角度扫描,因此出现了各种扫描原理。主要分为:同轴旋转、棱镜旋转、MEMS扫描、相位型、闪烁型。激光雷达不仅用于感知,还用于绘制和定位高精度地图。它被认为是L3级以上自动驾驶的重要传感器。毫米波雷达:主要用于检测交通车辆。它既快速又准确,而且不容易受到天气的影响。它无法检测车道线上的交通标志。毫米波雷达由芯片、天线和算法组成。基本原理是发射电磁波,观察回波和入射波之间的差异,以计算距离和速度。成像精度的测量指标是距离检测精度、角分辨率和速度差分辨率。毫米波频率越高,带宽越宽,成像越精细,主要分为77GHz和24GHz两种。综合导航:GNSS板通过天线接收来自所有可见GPS卫星和RTK的信号,然后进行解释和计算,以获得自己的空间位置。当车辆通过隧道或在高耸建筑物之间的街道上行驶时,由于信号受阻,存在无法在该信号盲区进行导航的风险。有必要对惯性导航系统的信息进行融合。INS具有全天候、完全自主、不受外部干扰的优点,可以提供完整的导航参数(位置、速度、姿态)。组合后,可以实现比两次独立操作的最佳性能更好的定位和姿态测量性能。第三,刺激……
自动驾驶传感器的定义
该表总结了常见自动驾驶功能中使用的传感器以及每个传感器的应用。各国还发布了L1和L2自动驾驶功能的相关标准,加速了市场的发展和产品的落地。自2013年以来,欧盟新车安全评估协会(E-NCAP)已将ADAS添加到评分规则中。到2017年,速度辅助系统(SAS)、自动紧急制动(AEB)和车道偏离警告/车道偏离辅助系统(LDW/LKD)的奖金要求将是系统,装机容量将达到100%。美国国家公路交通安全管理局(NHTSA)和公路安全保险协会(IIHS)也提出,2022年应将自动紧急制动(AEB)等ADAS功能纳入技术标准。
自动驾驶要求仅限于车辆的ODD(操作设计领域),即设计应用范围。城市道路+城际高速公路是自动驾驶汽车的普遍应用范围。中国城市封闭道路的最高限速为80公里/小时,高速公路的限速为120公里/小时。干沥青路面的摩擦系数为0.6。根据制动距离公式计算制动距离:S=V*V/2μ,得到第一行的表格。然后,结合自动驾驶系统和制动系统的反应时间,得到下表。从这两张表中可以看出,制动距离与速度的平方成正比,与摩擦系数成反比。当摩擦系数不变时,制动距离取决于车速。如果车速增加一倍,制动距离将增加到四倍。摩擦系数μ主要与路面材料和天气有关。在中国最高限速150米的情况下,自动驾驶传感器的检测距离可以满足需求。自动驾驶技术的开发人员可以根据实际场景的速度选择所需的传感器,不需要盲目追求传感器的性能来提高整体成本。
传感器分辨率和物体检测之间的关系可以通过atan反正切函数来计算,图中给出的公式除以2,主要是为了确保当传感器检测时最小角度为最小目标的一半时,在任何情况下都可以覆盖一个像素,以确保分辨率。由于物体不在一个角度内,因此避免漏检。理论上,当分辨率为0.4度时,100米外可以探测到汽车,而当分辨率为0.1度时,400米外可以检测到汽车。然而,仅仅通过检测来识别物体并不意味着它可以被识别。从自动驾驶算法的角度来看,例如,激光雷达物体识别需要4到5条线来识别物体类别。从这个角度来看,如果自动驾驶系统在50米的范围内使用分辨率为0.4度的激光雷达,它真的可以识别汽车。6
自动驾驶离不开多传感器融合,其中激光雷达和摄像头都是光学传感器,核心部件和处理电路相似。预计两个传感器的前端将融合在一起,直接输出R、G、B、X、Y和Z颜色和点云的融合信息。在传感器内部实现数据融合可以大大降低后端的计算和处理能力。其中以AEye为代表,其iDAR智能感知系统可以将2D真实世界的颜色信息即时智能叠加在3D数据上。其动态扫描和发射模式技术可以通过控制每个激光脉冲的扫描来查询每个点的三维坐标和像素。第四,自动驾驶的大脑
7
工控机─IPC)是一种加固型个人计算机,可作为工业控制器在工业环境中可靠运行。采用符合“EIA”标准的全钢化工业底盘,增强抗电磁干扰能力,采用总线结构和模块化设计技术。CPU和每个……
功能模块均采用插入式结构,压杆软锁,提高了抗冲击和抗振动能力。整体架构设计需要考虑ISO26262的要求,并对CPU、GPU、FPGA和总线进行冗余设计,以防止单点故障。当整个IPC系统发生故障时,MCU将做出最终保证,并直接向车辆Can总线发送指令,控制车辆停车。目前,这种集中式架构将所有计算工作放在一台工业计算机中,整体体积大,功耗高,不适合未来大规模生产。然而,这种架构非常方便,算法迭代不需要考虑硬件的整体设计和车辆法规的要求。使用传统的X86架构,可以非常快速地构建计算平台,并且卡槽设计也便于硬件更新。
8
工业计算机集中操作的整体体积和功耗无法满足大规模生产的要求,因此有必要采用域控制器的嵌入式方案。将每个传感器的原始数据连接到传感器盒,在传感器盒中完成数据融合,然后将融合后的数据传输到计算平台进行自动驾驶算法处理。自动驾驶汽车具有复杂的功能,出于安全考虑,域控制器将被广泛使用,以确保每个模块和功能不会相互影响。根据功能的不同,它分为车身域控制器、车载娱乐域控制器、动力总成域控制器、自动驾驶域控制器等。以自动驾驶域控制为例,它承担着自动驾驶所需的数据处理算力,包括毫米波雷达、摄像头、,激光雷达、综合导航等设备,还承担自动驾驶算法的操作。
9
随着自动驾驶技术的发展,算法也在不断改进。算法固化后,可以作为ASIC芯片,将传感器和算法集成在一起,实现传感器内部的边缘计算。进一步降低后端计算平台的计算量,有利于降低功耗、体积和车辆规划。其中,Mobileye是标杆企业。激光雷达处理需要一个高效的处理平台和先进的嵌入式软件。如图所示,瑞萨将包括高性能图像处理技术和低功耗的汽车R-CarSoC与Dibotics的3D实时定位和映射(SLAM)技术相结合,提供片上SLAM?. SLAM可以在SoC上实现高性能所需的3D SLAM处理。Dibotics还开发了一款名为“增强型激光雷达”的嵌入式激光雷达软件,可以提供实时和先进的激光雷达数据处理。
0
ASIC芯片是根据某些特定要求专门定制的,与通用GPU和FPGA相比,其尺寸更小、功耗更低、性能更稳定、批量成本更低。只要自动驾驶的算法公司完成芯片的前端设计,后端制造和技术都是非常成熟的行业,可以通过外包来实现。芯片制造过程由三部分组成:芯片设计、芯片制造和芯片封装。前端设计完成后,可以根据实际算法要求选择IP核,通过EDA(电子设计自动化)完成布局规划、布局和布线。根据延迟、功耗、面积等约束信息,合理设置物理设计工具的参数,以获得最佳配置,并确定组件在晶圆上的物理位置。芯片制造技术正在从193nm深紫外(DUV)发展到13.5nm极紫外(EUV)。半导体正在进入7nm时代,更先进的技术可以提高性能。与16nm技术相比,7nm可以将性能提高40%,并节省60%的能耗。芯片封装测试是指根据产品型号和功能要求,将被测试的晶圆加工成独立芯片的过程。传统……
恩智浦和ST等onal汽车电子公司在密封和测试过程中有更多的经验来完成芯片汽车分类的要求。五、自动驾驶汽车线控驱动系统
1
有线控制是有线控制的字面翻译。简单地理解,对车辆的控制是通过一系列命令来实现的,而不是物理操作。自动驾驶主要分为感知、决策和控制三个部分,控制层是自动驾驶的基础。感知定位就像驾驶员的眼睛,决策规划就像大脑,执行控制就像手和脚。要想为自动驾驶制定一个好的决策计划,我们还必须知道如何实施控制。为了实现自动驾驶,包括线控制动、线控转向和线控节气门在内的线控执行器是一种必然趋势。
2
在传统车辆中,通常使用液压或真空伺服机构来控制制动系统。对于自动驾驶来说,线控制动是最终的发展趋势,线控制动器用电子系统取代了液压或气动控制单元。上图显示了的线控制动解决方案,MK C1和MK100形成了一个冗余的线控制动器解决方案。MK C1将制动助力器和制动压力控制模块(ABS、ESC)集成到一个紧凑轻便的制动单元中。MK C1可以满足自动驾驶对更高压力动态特性的要求,并且由电力触发的紧急制动产生的制动距离要短得多。MK100是的汽车电子稳定控制系统(ESC)。在防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的基础上,增加了横摆角速度传感器、测向加速度传感器和方向盘角度传感器。前后轮、左右轮的驱动力和制动力由ECU控制,以确保车辆的横向稳定性。
3
电子助力转向(EPS)与线控转向最大的区别在于,EPS方向盘与车轮之间的连杆不参与线控转向技术,但仍采用机械连杆。从电信号控制的角度来看,EPS也可以被视为线控转向系统。英国和芬尼迪的Q50线控转向系统基本上延续了传统转向系统的结构。仅增加了一个离合器装置、三个ECU电子控制单元和一个转向力反馈装置。当车辆启动时,离合器装置将自动切断连接,转向任务将移交给电子控制系统。由于电子信号控制,它的传输响应更快、更容易。
4
线控节气门是一种电子节气门,通过位置传感器传递踏板深度和速度的信号,从而实现节气门功能。该信号将被ECU接收并解释,然后将发出控制命令,要求节气门打开应根据命令快速或轻轻打开的角度。这个过程准确而快速。不会出现机械磨损问题。目前,电子节气门已经被广泛使用,如果它有定速巡航,就可以识别出有电子节气门。早期,电子节气门是一种接触式,但最近已改为非接触式。有轨电车是通过电机扭矩实现的,只需直接发送扭矩信号,而油罐车是通过发动机管理系统(EMS)发送扭矩信号实现的。
5
转向最早的修改是切断转向柱的末端并安装转向电机进行修改。然后使用原车的转向动力系统进行转向控制。制动最早的修改是安装电机踏板,然后使用原车的ESC系统进行控制。今后将选择MK C1等线控控制系统。加速度的最早修正是通过EMS发送扭矩信号来实现的,随后的修正方案是通过电子油门来实现的……
通过借用原车的ACC接口。量产自动驾驶的线控方案可以参考英国Q50和菲尼迪的线控转向和MK100+MK C1的线控制动来实现。电机扭矩/制动压力信号由自动驾驶区域控制器直接输出到转向制动器的执行器,再结合大量的测试和校准,实现精确控制,从而为驾驶员和乘客带来完美的体感舒适。
6
从VSI发布的自动驾驶产业布局可以看出,自动驾驶产业是汽车、新能源、IT通信、交通、半导体、人工智能和互联网等10万亿巨头产业的跨界融合。自动驾驶汽车是物质流、能量流和信息流的集合体,需要行业各方的深度合作。只有软硬件深度融合,突破壁垒的企业才能赢得皇冠上的明珠。
7
质量保证问答1。市场上哪些型号可以支持无人驾驶线控改装?A: 绝大多数人做不到。具有自动驻车、AEB和ACC功能的车辆有望在不损坏原车执行器的情况下进行改装。其他的只能通过破坏原车的执行器来进行猛烈的修改。2.如果由于使用场景的限制,激光雷达无法安装在车顶上,但在车辆周围安装了多个激光雷达,会带来什么影响?A: 我们需要做激光雷达的外耦合。联轴器完成360度识别。3.如果无人车的停车定位精度很高(水平位置精度和航向精度),建议采取什么解决方案?答:定位精度可以通过RTK差分定位来实现。目前,RTK可以实现厘米级定位。其次,激光雷达的数据可以再次融合,激光雷达本身的测量精度可以达到2厘米。通过将这两个传感器的数据与优秀的算法相结合,可以达到高精度的定位要求。4.请问,哪些主流制造商提供主控制器:汽车CPU?A: 目前,CPU是基于X86英特尔的。如果所有ASIC芯片都是由ARM内核制成的。5.制动最早的修改是安装电机踏板,然后使用原车的ESC系统进行控制。今后将选择MK C1等线控控制系统。市场上改装的林肯MKZ的刹车是否也由ESC完成?A: 原MKZ汽车的停车系统具有良好的线控能力,其制动基于车身的ESC。6
自动驾驶离不开多传感器融合,其中激光雷达和摄像头都是光学传感器,核心部件和处理电路相似。预计两个传感器的前端将融合在一起,直接输出R、G、B、X、Y和Z颜色和点云的融合信息。在传感器内部实现数据融合可以大大降低后端的计算和处理能力。其中以AEye为代表,其iDAR智能感知系统可以将2D真实世界的颜色信息即时智能叠加在3D数据上。其动态扫描和发射模式技术可以通过控制每个激光脉冲的扫描来查询每个点的三维坐标和像素。第四,自动驾驶的大脑
7
工控机─IPC)是一种加固型个人计算机,可作为工业控制器在工业环境中可靠运行。采用符合“EIA”标准的全钢化工业底盘,增强抗电磁干扰能力,采用总线结构和模块化设计技术。CPU和各功能模块均采用插入式结构,压杆软锁定,提高了抗冲击和抗振动能力。整体架构设计需要考虑ISO26262的要求,并对CPU、GPU、FPGA和总线进行冗余设计,以防止单点故障。当整个工控机系统发生故障时,MCU将做出最终保证,并直接检测……
车辆指令Can总线控制车辆停车。目前,这种集中式架构将所有计算工作放在一台工业计算机中,整体体积大,功耗高,不适合未来大规模生产。然而,这种架构非常方便,算法迭代不需要考虑硬件的整体设计和车辆法规的要求。使用传统的X86架构,可以非常快速地构建计算平台,并且卡槽设计也便于硬件更新。
8
工业计算机集中操作的整体体积和功耗无法满足大规模生产的要求,因此有必要采用域控制器的嵌入式方案。将每个传感器的原始数据连接到传感器盒,在传感器盒中完成数据融合,然后将融合后的数据传输到计算平台进行自动驾驶算法处理。自动驾驶汽车具有复杂的功能,出于安全考虑,域控制器将被广泛使用,以确保每个模块和功能不会相互影响。根据功能的不同,它分为车身域控制器、车载娱乐域控制器、动力总成域控制器、自动驾驶域控制器等。以自动驾驶域控制为例,它承担着自动驾驶所需的数据处理算力,包括毫米波雷达、摄像头、,激光雷达、综合导航等设备,还承担自动驾驶算法的操作。
9
随着自动驾驶技术的发展,算法也在不断改进。算法固化后,可以作为ASIC芯片,将传感器和算法集成在一起,实现传感器内部的边缘计算。进一步降低后端计算平台的计算量,有利于降低功耗、体积和车辆规划。其中,Mobileye是标杆企业。激光雷达处理需要一个高效的处理平台和先进的嵌入式软件。如图所示,瑞萨将包括高性能图像处理技术和低功耗的汽车R-CarSoC与Dibotics的3D实时定位和映射(SLAM)技术相结合,提供片上SLAM?. SLAM可以在SoC上实现高性能所需的3D SLAM处理。Dibotics还开发了一款名为“增强型激光雷达”的嵌入式激光雷达软件,可以提供实时和先进的激光雷达数据处理。
0
ASIC芯片是根据某些特定要求专门定制的,与通用GPU和FPGA相比,其尺寸更小、功耗更低、性能更稳定、批量成本更低。只要自动驾驶的算法公司完成芯片的前端设计,后端制造和技术都是非常成熟的行业,可以通过外包来实现。芯片制造过程由三部分组成:芯片设计、芯片制造和芯片封装。前端设计完成后,可以根据实际算法要求选择IP核,通过EDA(电子设计自动化)完成布局规划、布局和布线。根据延迟、功耗、面积等约束信息,合理设置物理设计工具的参数,以获得最佳配置,并确定组件在晶圆上的物理位置。芯片制造技术正在从193nm深紫外(DUV)发展到13.5nm极紫外(EUV)。半导体正在进入7nm时代,更先进的技术可以提高性能。与16nm技术相比,7nm可以将性能提高40%,并节省60%的能耗。芯片封装测试是指根据产品型号和功能要求,将被测试的晶圆加工成独立芯片的过程。传统的汽车电子公司,如恩智浦和ST,在密封和测试过程中有更多的经验来完成芯片汽车分类的要求。五、自动驾驶汽车线控驱动系统
1
有线控制是有线控制的字面翻译。简单地说……
据了解,车辆的控制是通过一系列命令而不是物理操作来实现的。自动驾驶主要分为感知、决策和控制三个部分,控制层是自动驾驶的基础。感知定位就像驾驶员的眼睛,决策规划就像大脑,执行控制就像手和脚。要想为自动驾驶制定一个好的决策计划,我们还必须知道如何实施控制。为了实现自动驾驶,包括线控制动、线控转向和线控节气门在内的线控执行器是一种必然趋势。
2
在传统车辆中,通常使用液压或真空伺服机构来控制制动系统。对于自动驾驶来说,线控制动是最终的发展趋势,线控制动器用电子系统取代了液压或气动控制单元。上图显示了的线控制动解决方案,MK C1和MK100形成了一个冗余的线控制动器解决方案。MK C1将制动助力器和制动压力控制模块(ABS、ESC)集成到一个紧凑轻便的制动单元中。MK C1可以满足自动驾驶对更高压力动态特性的要求,并且由电力触发的紧急制动产生的制动距离要短得多。MK100是的汽车电子稳定控制系统(ESC)。在防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的基础上,增加了横摆角速度传感器、测向加速度传感器和方向盘角度传感器。前后轮、左右轮的驱动力和制动力由ECU控制,以确保车辆的横向稳定性。
3
电子助力转向(EPS)与线控转向最大的区别在于,EPS方向盘与车轮之间的连杆不参与线控转向技术,但仍采用机械连杆。从电信号控制的角度来看,EPS也可以被视为线控转向系统。英国和芬尼迪的Q50线控转向系统基本上延续了传统转向系统的结构。仅增加了一个离合器装置、三个ECU电子控制单元和一个转向力反馈装置。当车辆启动时,离合器装置将自动切断连接,转向任务将移交给电子控制系统。由于电子信号控制,它的传输响应更快、更容易。
4
线控节气门是一种电子节气门,通过位置传感器传递踏板深度和速度的信号,从而实现节气门功能。该信号将被ECU接收并解释,然后将发出控制命令,要求节气门打开应根据命令快速或轻轻打开的角度。这个过程准确而快速。不会出现机械磨损问题。目前,电子节气门已经被广泛使用,如果它有定速巡航,就可以识别出有电子节气门。早期,电子节气门是一种接触式,但最近已改为非接触式。有轨电车是通过电机扭矩实现的,只需直接发送扭矩信号,而油罐车是通过发动机管理系统(EMS)发送扭矩信号实现的。
5
转向最早的修改是切断转向柱的末端并安装转向电机进行修改。然后使用原车的转向动力系统进行转向控制。制动最早的修改是安装电机踏板,然后使用原车的ESC系统进行控制。今后将选择MK C1等线控控制系统。加速度的最早修改是通过EMS发送扭矩信号来实现的,随后的修改方案是通过借用原车的ACC接口通过电子节气门来实现的。量产自动驾驶的线控方案可以参考英国Q50和菲尼迪的线控转向和MK100+MK C1的线控制动来实现。电机扭矩/制动压力信号由自动驾驶区域控制器直接输出到转向制动器的执行器……
结合大量的测试和校准,实现精确的控制,从而为驾驶员和乘客带来完美的体感舒适。
6
从VSI发布的自动驾驶产业布局可以看出,自动驾驶产业是汽车、新能源、IT通信、交通、半导体、人工智能和互联网等10万亿巨头产业的跨界融合。自动驾驶汽车是物质流、能量流和信息流的集合体,需要行业各方的深度合作。只有软硬件深度融合,突破壁垒的企业才能赢得皇冠上的明珠。
7
质量保证问答1。市场上哪些型号可以支持无人驾驶线控改装?A: 绝大多数人做不到。具有自动驻车、AEB和ACC功能的车辆有望在不损坏原车执行器的情况下进行改装。其他的只能通过破坏原车的执行器来进行猛烈的修改。2.如果由于使用场景的限制,激光雷达无法安装在车顶上,但在车辆周围安装了多个激光雷达,会带来什么影响?A: 我们需要做激光雷达的外耦合。联轴器完成360度识别。3.如果无人车的停车定位精度很高(水平位置精度和航向精度),建议采取什么解决方案?答:定位精度可以通过RTK差分定位来实现。目前,RTK可以实现厘米级定位。其次,激光雷达的数据可以再次融合,激光雷达本身的测量精度可以达到2厘米。通过将这两个传感器的数据与优秀的算法相结合,可以达到高精度的定位要求。4.请问,哪些主流制造商提供主控制器:汽车CPU?A: 目前,CPU是基于X86英特尔的。如果所有ASIC芯片都是由ARM内核制成的。5.制动最早的修改是安装电机踏板,然后使用原车的ESC系统进行控制。今后将选择MK C1等线控控制系统。市场上改装的林肯MKZ的刹车是否也由ESC完成?A: 原MKZ汽车的停车系统具有良好的线控能力,其制动基于车身的ESC。
据外媒报道,宝马生产线工人的整体响应速度很快。宝马采用了新制造策略混合型制造(Hybridizedproduction)。
1900/1/1 0:00:00“就因为关税这个事,6月本来都是淡季了,但我们店里最近一直都特别地火爆。”北京一家宝马4S店内的销售人员兴奋地表示。因为关税的下调,本该是处于淡季的宝马店内,宝马x5、7系等进口车持续热销。
1900/1/1 0:00:00中国乘用车企业平均燃料消耗量与新能源汽车积分(简称“双积分”政策)走进了“积分交易”阶段。
1900/1/1 0:00:007月6日,汽车营销资深人士赵焕正式加入电咖汽车,担任公司副总裁,分管公关传播和互动化数字营销业务。
1900/1/1 0:00:00“这些报道其实没有什么根据,总部不会对我们营销费用进行削减。”7月4日,在雷克萨斯中国半年度沟通会上,该公司一名高层表示。“我们试驾的成本其实非常低,一次活动费用远低于报道所公开的数字。
1900/1/1 0:00:00据商务部网站7月6日消息,商务部新闻发言人就美国对340亿美元中国产品加征关税发表谈话。发言人指出,美国7月6日开始对340亿美元中国产品加征25的关税。
1900/1/1 0:00:00