据外媒报道,根据美国专利商标局发布的文件,福特获得了一项名为“非自动转向模式”的技术专利。

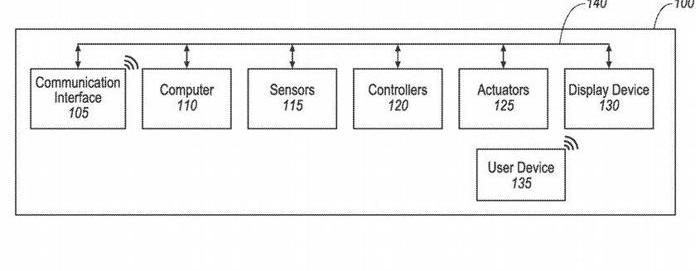
福特希望自动驾驶汽车的用户能够使用智能手机来完成车辆的转向操作。系统将通过无线网络接收用户在智能手机设备上的操作输入,并将其用于前轮转向。该软件应用程序类似于Tilt Racer应用程序,可以将智能手机转换为控制器,并与比赛模拟器交互。
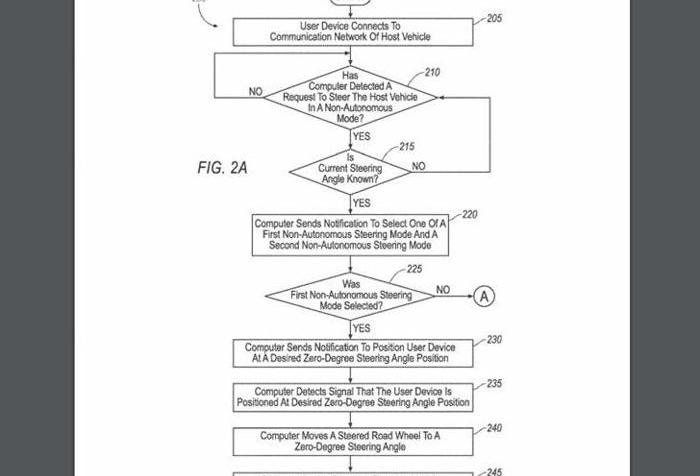
首先,用户发送车辆转向请求,车载计算机将决定车辆的转向角度,并要求用户在两种可用的转向模式之间进行选择。如果选择“第一自主转向模式”,则车载系统将要求用户在开始车辆转向操作之前,使用车辆的零转向角校准设备。大概只有当车辆完全停止时,才能启用此选项。

然后,车辆会根据用户的意愿转向,但它需要用户智能手机设备中的加速度计和陀螺仪的帮助,旨在感应设备的运动、运动频率、重心和用户的抓握角度。例如,如果设备从零位置旋转360度,车载计算机将引导车辆的车轮的转向角设置为360度。

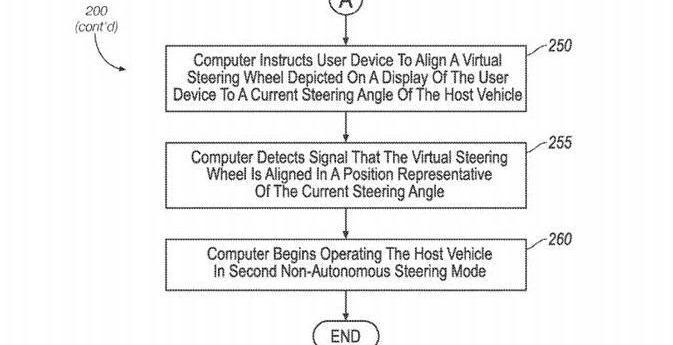
另一个选项是“第二自主转向模式”。在这种模式下,车载计算机会要求用户校准设备显示屏上的虚拟方向盘,以与车辆前轮的转向角保持一致。用户可以用手指在触摸屏上操作方向盘进行转向操作。

两种转向模式下的所有操作都将由电动执行器启动,因为操作员与车辆部件之间的物理接触已经断开,并且使用无线网络进行控制。
福特对用户使用的设备没有任何限制。只要用户的智能手机配备处理器、存储器、显示屏、触摸屏、加速度计、陀螺仪和通信功能,就可以使用福特的自动驾驶和转向功能。但需要指出的是,这只是福特推出的早期版本,该功能将定位未来车辆的(转向)控制。
福特表示,专利文件仅提供说明,预计其专利的设计理念将随着时间和公司专业知识的积累而不断演变,这是一个不断变化的设计理念。(本文图片选自carbonzz.com)
 据外媒报道,根据美国专利商标局发布的文件,福特获得了一项名为“非自动转向模式”的技术专利。
据外媒报道,根据美国专利商标局发布的文件,福特获得了一项名为“非自动转向模式”的技术专利。
福特希望自动驾驶汽车的用户能够使用智能手机来完成车辆的转向操作。系统将通过无线网络接收用户在智能手机设备上的操作输入,并将其用于前轮转向。该软件应用程序类似于Tilt Racer应用程序,可以将智能手机转换为控制器,并与比赛模拟器交互。
首先,用户发送车辆转向请求,车载计算机将决定车辆的转向角度,并要求用户在两种可用的转向模式之间进行选择。如果选择“第一自主转向模式”,则车载系统将要求用户在开始车辆转向操作之前,使用车辆的零转向角校准设备。大概只有当车辆完全停止时,才能启用此选项。
然后……
电动汽车会根据用户的意愿转弯,但它需要用户智能手机设备中的加速度计和陀螺仪的帮助,旨在感应设备的运动、运动频率、重心和用户的抓握角度。例如,如果设备从零位置旋转360度,车载计算机将引导车辆的车轮的转向角设置为360度。
另一个选项是“第二自主转向模式”。在这种模式下,车载计算机会要求用户校准设备显示屏上的虚拟方向盘,以与车辆前轮的转向角保持一致。用户可以用手指在触摸屏上操作方向盘进行转向操作。
两种转向模式下的所有操作都将由电动执行器启动,因为操作员与车辆部件之间的物理接触已经断开,并且使用无线网络进行控制。
福特对用户使用的设备没有任何限制。只要用户的智能手机配备处理器、存储器、显示屏、触摸屏、加速度计、陀螺仪和通信功能,就可以使用福特的自动驾驶和转向功能。但需要指出的是,这只是福特推出的早期版本,该功能将定位未来车辆的(转向)控制。
福特表示,专利文件仅提供说明,预计其专利的设计理念将随着时间和公司专业知识的积累而不断演变,这是一个不断变化的设计理念。(本文图片选自carbonzz.com)
近期,国内不少互联网及通信行业巨头纷纷追捧人工智能芯片。虽然很多厂商的人工智能芯片还处于PPT状态,或者只是堆在仓库里积灰尘,但这并不妨碍资本对这些企业的青睐。
1900/1/1 0:00:00曾经,在那个没有电子地图或电子地图还没有普及的时代,人们出行要么靠四处问人,要么靠纸质地图。不知道有多少人经历过那种场景:走出火车站的时候,第一个向你迎上来的是那些卖纸质地图的大妈。
1900/1/1 0:00:0010月11日,华人运通官方宣布前张江高科副总经理、智慧园区建设与产业综合体运营专家朱攀确认加盟华人运通,出任副总裁,将负责公司在智慧园区及城市领域的业务规划与拓展。
1900/1/1 0:00:00关于贾跃亭的法拉第未来(以下简称“法拉第”),外界最关心的一个问题,是这家公司何时开始真正生产电动车,何时向市场交付新车。据外媒最新消息,法拉第有可能在明年年中启动量产。
1900/1/1 0:00:00未来143天,特斯拉的偿债能力面临严峻考验。彭博报道称,未来13个月内,在特斯拉115亿美元的债务中,有超过15亿美元债券需到期偿付。
1900/1/1 0:00:00据外媒报道,瑞士电池技术初创公司Innolith宣布对其创新电池技术平台进行商业化,以解决全球电力短缺。
1900/1/1 0:00:00